
2.1 同步触发驱动电路
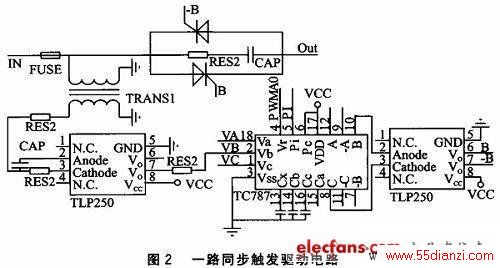
为了使各个晶闸管的触发脉冲与其阳极电源保持严格的同步相位关系,在系统中必须设置同步电路。本系统中,同步信号采用3个同步变压器,同步变压器输出的信号经过光电隔离及功率驱动后送入DSP,由DSP检测同步信号状态,以保证晶闸管触发脉冲相位与主电路电压相位精确可调。同时,由三相电源经同步变压器后输出的电压信号通过电阻、电容组成的限流移相电路移相30°后,再经过光耦TLP250驱动后送到晶闸管集成触发芯片TC787。
TC787主要包括3路相同的部分:同步过零检测和极性检测、锯齿波形成及比较电路,以及抗干扰锁定、脉冲发生器、脉冲形成、脉冲分配和驱动电路。触发电路接受DSP的控制,DSP根据控制的需要由PWM输出转换得到一个直流电压。该电压被加到TC787的第4脚,4脚的电压与芯片内部的锯齿波比较,取得交相点,控制输出脉冲。输出脉冲通过脉冲放大整形后送出,作为晶闸管的触发信号。晶闸管的输入是采用光耦驱动。图2为一路同步触发驱动电路,光耦芯片采用TLP250。
2.2 电压电流检测电路
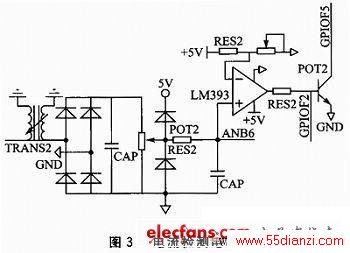
同步变压器输出的三相电压分别经过全桥整流、滤波和分压后获得一个直流电压信号,将此信号作为反馈输入到DSP的A/D引脚,A/D转换器对此信号进行采样,然后取平均值作为此时电压的反馈值,再根据值的大小进行判断和处理。电流互感器的输出经过全桥整流、滤波和分压后获得一个直流电流信号,将此信号作为反馈输入DSP的A/D口,A/D转换器对此信号进行采样,然后取平均值作为此时电流的反馈值,再根据值的大小进行判断和处理。电流检测电路如图3所示。电压检测电路与此类似,不再赘述。
3.2 中断处理
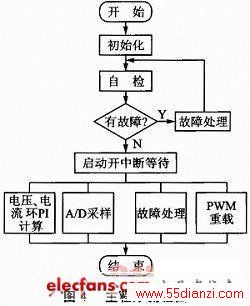
系统中断响应共4个中断源,按优先级从高到低包括:故障处理中断、A/D采样中断、电压环和电流环PI计算中断、PWM重载中断。电压和电流反馈量是晶闸管软启动系统的重要反馈信息。在系统中,采用以电流作为反馈量的恒流启动方式。A/D采样中断测得电流电压反馈量,如果该值是故障值(过流、过压、欠压、缺相等),则进入故障处理中断;否则进入电压环和电流环PI计算中断,经PI调节计算得到触发角,触发PWM重载中断,输出触发信号,进行调整。
在56F8346中有两个模/数转换模块(ADC),包括16路模/数转换输入口,使用4个采样保持器。本系统使用两路采样保持器,对电流、电压信号进行同时采样。ADc采样时刻与PWM中心时刻调整成精确同步,这样每次PWM正脉宽的中心时刻同步启动ADC。
3.3 按键显示
本系统采用非编码键盘,以扫描方式查寻键值。显示部分采用5个共阴极的LED显示器,前2位显示参数或者故障类别,后3位显示相应参数的数值。键盘部分实现人机对话、参数设定与修改,显示部分用来实现工作参数及故障类别显示。
3.4 软件抗干扰措施
由于各种干扰源的存在,在系统硬件采取措施的基础上,进行软件抗干扰设计。在模拟输入信号端采用硬件滤波后,再使用软件滤波技术,保证数据信息的可靠和可信;对于状态信号的抗干扰输入,多次重复采样,直到连续两次或多次采集结果完全一致时为有效;在软件设计中使用了软件冗余、软件陷阱和看门狗技术,有效地防止程序失效和陷入死循环,保证系统和程序正常运行。
4 总结
本文所设计的软启动器能实现以下功能:
①能克服直接启动和传统降压启动的缺点,实现平滑、无级加速的启动,完善的保护功能可以实现电动机的缺相、过压、欠压、过流、过载、短路保护等;
②根据所需的启动技术参数和要求进行启动,对电网及设备的冲击相对较弱;
③正常工作时显示工作电压、工作电流、最大电流等参数。故障时显示故障原因及参数,并进行故障报警。
上一篇:软起动器对电机过载保护的控制方式






