本文介绍了机场激光驱鸟器扫描系统设计的基本内容,即系统原理、功能、特点、组成及各分系统设计;分析了系统的要求和使用条件,对直流电机选型进行计算及校核,验证了设计的正确性和可靠性。
近年来,随着国内外生态环境的改善和人民保护鸟类的意识的提高,鸟类越来越多。这给世界和中国军民用航空业却带来了灾难。机场采取了各种各样的驱鸟措施,并且起到了一定的效果。但现在世界范围内还没有一种能解决全空域、全时间段的全能手段来驱鸟。驱鸟是一个世界性难题,是一个目前亟待解决的难题。
机场激光驱鸟器扫描系统主要用以控制光线在机场允许范围内均匀扫描,刺激恐吓鸟类,使其不敢在机场降落、盘旋、停留,达到保护航空安全,维护乘客的财产和生命安全的目的。
1 技术指标
扫描半径:1500m(平直跑道);
方位扫描范围:-120°~+120°;
俯仰扫描范围:-4°~+2°;
方位在-120°~+120°范围内做匀速(1°/s)重复扫描;俯仰在-4°~+2°范围内做匀速(1°/s)重复扫描。
2 系统原理、功能、特点及组成
2.1 工作原理
系统根据上位机的设定及指令,能够自动控制转台进行方位、高低转动,能够自动控制光线扫描范围、光斑停留位置和停留时间,原理框图见图1。
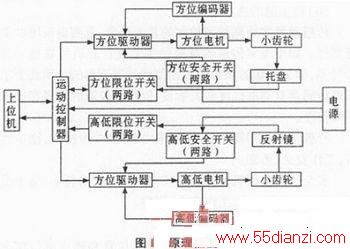
2.2 系统功能
控制机柜内部的激光器发射出激光,经扩束管扩束后向上射入反射镜,反射镜由转台带动进行高低方位运动,反射出的激光在机场允许范围内均匀扫描,刺激、恐吓鸟类,使其不敢在机场停留,保护航空安全,维护乘客的财产和生命。
2.3 系统特点
(1)连续工作时间长,可靠性要求高;
(2)系统转速低,要求低速平稳性好,回转运动精度高;(3)由于采用激光系统,要求该系统安全可靠性高。
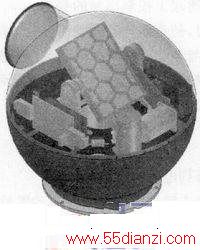
2.4 系统组成
该系统由以下几个分组成:方位伺服系统、高低伺服系统、控制系统、反射镜系统、防护罩、回转支撑等。系统组成见图2。
方位伺服系统包括方位电机、方位驱动器、方位减速器、方位传感器、回转主轴。
高低伺服系统包括高低电机、高低驱动器、高低减速器、高低传感器、高低轴系。
控制系统由控制器、数据运算单元、数据存储单元、数据通讯单元、接口单元、AD/DA转换单元、DA转换单元、脉冲发生单元等组成。
反射镜系统包括反射镜和支撑。
防护罩包括上罩体和下罩体。
2.5 使用条件
工作环境:室外;
工作温度:-10℃~+40℃;
储存温度:-20℃~+50℃。
3 各分系统设计
3.1 方位伺服系统、高低伺服系统设计
(1)方位扫描范围:-120°~+120°,所以无需采用回流环,可以节约生产成本。
(2)因激光经位于转台正下方的饥柜内扩束器,射入反射镜内,所以为使光束不受线缆的影响,采用双层壁的设计方法。
(3)轴承的选取:根据总体要求,主轴中心既要通过80~100mm光束,又要通过电缆,且电缆不允许干扰光束,同时需要承受轴向力和径向力,选取向心推力球轴承。
(4)传动方式:齿轮传动。
齿轮传动具有以下特点:
①效率高,在常用的机械传动中,以齿轮传动效率为最高,这对大功率传动有很大的经济意义;②结构紧凑,比带、链传动所需的空间尺寸小;③传动比稳定,传动比稳定往往是对传动性能的基本要求;④工作可靠、寿命长。
根据实际结构尺寸要求,拟定Z1=17,Z2=403,减速比i为23.7。
(5)电机选取:驱动部分是利用电机产生的力矩和力,通过机械传动装置来驱动执行机构。直流电机控制性能优越,惯性小,启动力矩高,因此这类系统的动作灵敏,快速响应特性好,能迅速跟上控制信号的变化。
选取电机时,初步估计各运动构件相应的质量和转动惯量,并把所有参与运动构件质量或转动惯量都等效到电机主轴上。并把各构件所受的外力也同样等效到电机主轴上进行计算,动力学方程为:
![]()
式中:T——折算到电机主轴的转矩;
JM——电机主轴及同步运动件转动惯量;
J1——负载转动惯量;
j1——从电机主轴到负载的速比;
Tf1——摩擦转矩;
ω——电机角速度;
t——时间。
负载功率P的计算公式为:
P=ω1·T1 (2)
式中:T1——负载的转矩;
ω1——负载角速度;
估算出负载功率P。
以方位伺服系统为例计算,拟选方位电机BLM57050,具体参数见表1,电机转子惯量JM=0.011 9 Nm。
方位角加速度为57.3°/s2(1 rad//s2),摩擦力矩Tf1要求做到0.12Nm。
经计算J1=108.5g·m2,代入公式(1)中,

根据估算结果,进行校核:
①负载力矩T=0.32 Nm小于电机的额定转矩0.29 Nm;
②电机功率大于估算功率P=1.8 W;
③电机转速0.4 rpm小于电机的额定转速Nn;
④负载等效惯量限制在2.5倍的电机惯量之内。
经过校验,选定方位电机为BLM57050电动机,符合要求。同时,高低电机选为BLM57025。
根据实际要求,距离为1500m时光斑的步长为200mm。
伺服电机的控制精度由电机轴后端的旋转编码器保证。该电机带有标准1000线编码器,细分后达4000线,配以23.7倍减速器,其脉冲当量为(2π×1500/360)×(360/4000/23.7)=120mm<200mm,精度足够高,完全符合技术要求。

(6)传感器的选择与设计
传感器是实现测量和控制的首要环节,是测量系统的关键部件。如果没有传感器对原始信号进行准确可靠地采样和转换,那么一切的测量和控制都将是不可靠的。因此要求所选传感器有高准确度和灵敏度,以保证仪表的测量和控制的可信度。
行程开关采用霍尔传感器,属非接触式传感器,稳定性好,工作安全、可靠。
安全开关采用机械行程开关,结构简单,功耗小,易于维修和校准,使用方便,工作安全、可靠。
3.2 控制系统的设计
运动控制是一门有关如何对物体位置和速度进行精密控制的技术。典型的运动控制系统由三部份构成:控制部分;驱动部分;执行部分。如图3所示。

其中运动执行部件通常为步进电机或者伺服电机。当驱动器接收到一个脉冲信号,加以放大,驱动电机按设定的方向转动角度。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
本文关键字:激光 传感-检测-采集技术,电子知识资料 - 传感-检测-采集技术






