下面我们通过不同的
的选择来对系统进行分析。
5.1 切换面为
切换面为
,即取横轴作为滑模面,相平面,运动轨迹分别如图4,图5所示。我们从图3中可以看出,要使系统运动能够进入切换面,运动起点必须在起始于点(-2,-70)的曲线所包围的区域之外。因此在这种情况下要满足进入条件比较困难,如开始于(-2,-60)的运动就不能到达该切换面,而且在负半轴上不存在产生稳定的滑动运动的条件,这就说明了文[1]中为什么不能单独采用电压作为直接控制量。

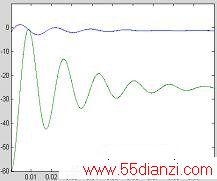
图4 的相轨迹 图5 的系统运动轨迹(幅度大的是电压,幅度小的是电流,以下相同)
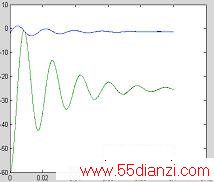
5.2 切换面为
切换面为
,即取竖轴为切换面,相平面,运动轨迹分别如图6,图7所示。从图3中很容易看出来该切换面满足前面三个条件,由于只采用了一个状态变量,在实际电路搭建时,整个控制设计得以简化!


图 6 的相轨迹 图 7 的系统运动轨迹
5.3
接下来分析切换面在一,三相的情况:如图3,开始于(-2,-60)即初始状态的运动轨迹有两个,一个是当T=1时系统的运动轨迹(直线),另一个是T=0时系统的运动轨迹(逆时针曲线)。要让系统运动进入滑动面
并产生滑模运动,就要使
<-30(30为通过原点和(-2,-60)两点直线的斜率),虽然当斜率在26-30之间同样满足稳定要求,但整个系统抗干扰能力比较差。
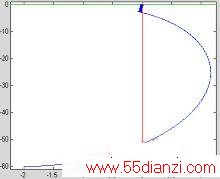
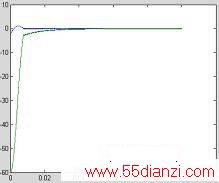
图8 相轨迹 图9 系统运动轨迹
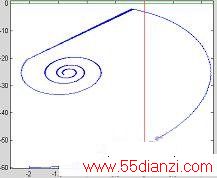

图10 相轨迹 图11 系统运动轨迹
5.4
当切换面位于二,四相限时,在电压误差等于-60伏以上空间,T=1,T=0时系统的运动轨迹在同一过程中都有两次经过切换面,一个是远离切换面,另一个是进入切换面。由文献[3]可知,虽然系统有机会进入切换面,但在切换面上不可能产生滑动运动,所以不适宜在此区域选择切换面。

仿真结果完全与分析一致。该方法借助计算机,没有复杂的公式推导,而且比较直观,从而证明该方法正确性和简单性。
6 结 论
本文通过图形法分析开关电源的滑动模型,确定了保证系统稳定的参数的选择范围以及分析了运动特性变化的特点。从仿真结果上证明该方法比传统分析方法简单、直观。但由于作图的维数限制,应此该方法只能应用于三阶及三阶以下系统。而开关电源有很大一部分是二阶,三阶系统,比如说Boost,Buck,正激变换器,反激变换器等都是二阶系统,因此该方法的提出对于滑模控制在开关电源中的研究是很有意义的!
参考文献
1.周宇飞等,Boost变换器滑模控制方法及其实验研究,电力电子技术[J]2000.1.4:42-44
2.朱长海等,基于滑模控制的Buck-Boost型AC-DC变换器,洛阳工学院学报[J]2002.23(1):85-88
3.姚琼荟,黄继起,吴汉松,变结构控制系统,四川:重庆大学出版社,1997:14-52
本文关键字:开关电源 开关电源技术,电源动力技术 - 开关电源技术
上一篇:电镀用开关电源,的设计






