1 前 言
开关电源通常有两大研究领域,一个是拓扑结构领域的研究,即开关电源的电路结构研究;另一个是控制方法领域的研究,一个控制方案的好坏往往决定开关电源的性能,实际工程中控制方案的复杂程度决定电源的造价的高低,因此很多电源设计者在控制方法的设计上投入了很多关注,并提出了各种控制方法。应用于开关电源的控制方法通常分为两大类:一类是线性控制方法,另一类是非线性控制方法。常用的电压闭环控制、电流闭环控制、双环控制和函数控制均属于线性控制方式。近期发展单周期控制、前馈控制、自适应控制和滑模控制则属于后者。在各种控制方案中,由于滑模控制对系统摄动和外界干扰在一定条件下具有不变性,即很强鲁棒性,所以得到研究者越来越多的关注。如文献[1]在开关变换器中应用滑模控制作了一定的研究。文献[2]则提出了Buck-Boost型AC-DC变换器的滑模控制的解决方案。以上文章虽然都导出控制模型并选取了参数,但未对参数是否满足滑模运动的条件给出证明。文献[1]中还曾提到不能单独采用电压误差作为直接控制对象,同样也未对不能单独采用电压误差作为直接控制对象的原因作详细证明。而在滑模控制中,参数的选择是非常重要的,它决定了系统工作的性能,不恰当的参数选择有可能导致滑模运动不能形成或者是不稳定。文献[3]虽然给出了传统的证明方法,但是该方法并不是很直观,而且比较复杂。本文则将通过有别于传统方法的方法给出保证系统稳定的参数选择证明。
2 滑模控制
滑模控制是在对继电系统的研究中发展起来的,是一种特殊的变结构控制。其特殊性在于该控制有切换,而且在切换面上系统将会沿着固定的轨迹产生滑动运动。要实现滑模控制,就要做三项工作:切换面的选取,控制函数的求取,参数的确定。其中参数的选择必须满足文献[3]中指出的滑模控制的三个要素:进入条件、存在条件和稳定条件。进入条件是保证系统对任意初始位置,运动都能够到达切换面。存在条件是保证这种运动到达切换面后,能在切换面上产生滑动运动。稳定条件有两个方面,一个是滑动的稳定条件,一个是系统的稳定条件。而这里的稳定条件则指的是系统在切换面上的滑动运动能够向工作点运动。当参数确定后,切换面和控制函数也随之确定。所以滑模控制问题最终转化为求取这三个要素的问题。三个要素的传统确定方法在文献[3]中作了详细的描述,但文献[3]中的三要素确定方法并不直观,计算起来也比较复杂,本文将针对这种情况提出一种利用图形确定滑模控制三要素的方法。同时,通过图形直观的说明切换面的不同选择对于系统性能的影响。
3 Boost电路的建模
Boost变换器的一般原理图如图1所示
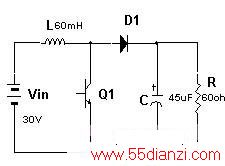
图1 Boost变换器原理图
以输出电压 和电感电流 作为状态变量。T表示开关的开关状态,T=1表示开关开通,T=0表示开关关断。当T=1时,其状态方程为:

(1)
当T=0时,其状态方程为
(2)
两者合并为

(3)
稳态时,
,代入方程(3)可求出稳态电压,电流为
(4)
以误差
,
作为变量,分别代入到(1),(2)中
(5)
(6)
4 相平面图
利用计算机(本文采用MATLAB)分别作出式(5)和(6)的相平面图,设定电源为恒定值30伏,输出电压设定为60伏,L=60mH,C=45μF,R=60Ω。
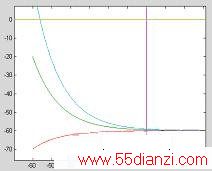

图2 T=1时系统运动相平面图 图3 T=0时的相平面图(环状曲线)
图2是由方程(5)确定的,对实际电路进行定性分析可知,当开关闭合后,由于无能量从电源端向输出端传递,达到稳定时,输出电压渐变为零,那么误差就稳定在-60伏。电源经过电感放电,电流是线性增大的,因此电流误差先减少后增大。这与仿真结果相同。图3将两种状态的相平面画在一起,其中逆时针旋转曲线由方程(6)确定,分析实际电路可知,输出电压最后稳定于30伏,即与输入电压相同,那么误差稳定于-30,仿真结果与分析结果相同。
5 三要素分析及试验仿真
下面我们通过相平面各个区域的运动特性来分析滑模控制的三要素,并通过不同参数的选择来分析参数对系统性能的影响。
从图1我们可以看出,在实际电路中,输出电压不可能等于负值,因此只有电压误差大于等于-60伏的空间对于我们的研究才有意义。
由于开关的频率不可能为无穷大,同时控制电路本身所具有的延时性,从而容易产生抖动,这也是制约滑模控制发展的主要因素。本系统为了减少抖动,采用指数趋近率
切换面为
本文关键字:开关电源 开关电源技术,电源动力技术 - 开关电源技术
上一篇:电镀用开关电源,的设计






