�� ��
������ѧģ���������������㷨����Ļ��������ݲ�ͬ�Ŀ�����Ҫ���Խ�����ͬ����ѧģ�͡����ij����о���������ѧģ��֮�⣬�������˻��ڲ�ͬ����ϵ��ѧģ�͵�����任����λ���������Ķ��塢PWM ����������������ԭ�����������������㷨������ص�һ���Ե����⡣
1 �����ѹ����������ѧģ��
����1.1 �����ѹ��������һ����ѧģ��
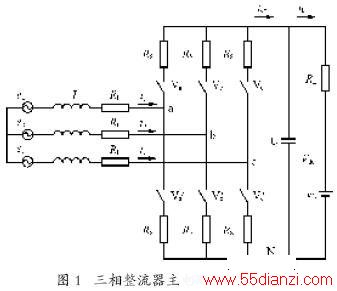
������ν�����ѹ��������һ����ѧģ�;��Ǹ��������ѹ�����������˽ṹ�������ྲֹ����ϵ��a��b��c���У����õ�·�������ɣ����������ѹ���������ɣ��������ѹ����������������һ����ѧ�����������ѹ�����������˽ṹ��ͼ1��ʾ��
��������ѧģ�������¼��������½�����
����1�������綯��Ϊ����ƽ�ȵĴ����Ҳ��綯�ƣ�ea��eb��ec����
����2�������˲����L �����Եģ��Ҳ������䱥��״����
����3�����ʿ��ع�����Ե���Rs��ʾ����ʵ�ʵĹ��ʿ��عܿ��������뿪������ĵ���Rs ������Ч����ʾ��
����4��Ϊ����������������˫���䣬������ֱ���ฺ���ɵ���RL��ֱ���綯��eL������ʾ��
�������������ѹ�����������Է�����Ҫ����һ����ѧģ�͵Ľ����ɲ�������������ʽ��
����1�����ÿ��غ���������һ����ѧģ�ͣ�
����2������ռ�ձ�������һ����ѧģ�͡�
�������ÿ��غ���������һ����ѧģ���Ƕ����������ع��̵ľ�ȷ���������ʺ����������IJ��η��棬��˱���������������ϵͳ�����Dz��ÿ��غ�����������ѧģ�͡��������������������˽ṹΪ�����������ÿ��غ���������һ����ѧģ�͡�
����Ϊ�������㣬���ȶ��嵥���Զ�ֵ�����غ���skΪ

�������������Ĺ��ʿ��ع���ĵ�Ч����Rs ͬ�����˲���е�Ч����RI�ϲ�������R=Rs+RI�����û��������ѹ���ɽ���������������a���·����Ϊ


����1.2 �����ѹ��������d-q ģ��
�������ྲֹ�Գ�����ϵ�µ�һ����ѧģ�;�����������������ֱ�۵��ص㡣����������ѧģ���У��������������Ϊʱ�佻��������������ڿ���ϵͳ����ơ�Ϊ�ˣ�����ͨ������任������Գƾ�ֹ����ϵ��a��b��c��ת�����Ե�������Ƶ��ͬ����ת�ģ�d��q������ϵ����������������ת�任������Գƾ�ֹ����ϵ�еĻ������ҽ���������ת����ͬ����ת����ϵ�е�ֱ���������Ӷ����˶Կ���ϵͳ����ơ�
��������������һ����ѧģ�;�ͬ����ת����任��ת��������������d-q ģ�͡�
����Ҫʵ�ִ����ྲֹ����ϵ��a��b��c��������ͬ����ת����ϵ��d��q���ı任����������ȷ������ϵ��d��q���Ŀռ�λ�á���ͼ2 ��ʾ�������ྲֹ����ϵ��a��b��c���У�E��I �ֱ��ʾ��������綯��ʸ���͵���ʸ��������E��I �Ե���������Ƶ������ʱ����ת������˲ʱ���������ۣ��������������ʱ��Ϊ��������������ת����ϵ��d��q����q ��������綯��ʸ��Eͬ�ᡣ��q �ᰴʸ��E����ʸ��E��q �ᣩ����ĵ�������iq����Ϊ�й�����������ʸ��E �ͺ�90����ǵ��ᣨd�ᣩ�����������id����Ϊ�����������⣬��ʼ�����£���q ����a���غϡ�

����1.3 ����任��Matlab/Simulink�е�ʵ��
���������ྲֹ����ϵ��a��b��c��������ͬ����ת����ϵ��d��q���ı任���㷨��������Ҫ��ģ��֮һ����ģ��ṹ���������㷨�������ǻ�������ͬ����ת
��������ϵ�ģ��ͻ�SVPWM �㷨��Ȼ�ǻ������ྲֹ����ϵ�ģ������ڶԵ�������Ч���ķ�����Ҳ�õ�������任ģ�顣�ڴ˽���ģ�鹦�ܵ�ʵ�ַ��������ܡ�
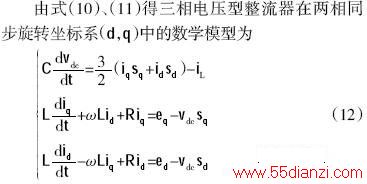
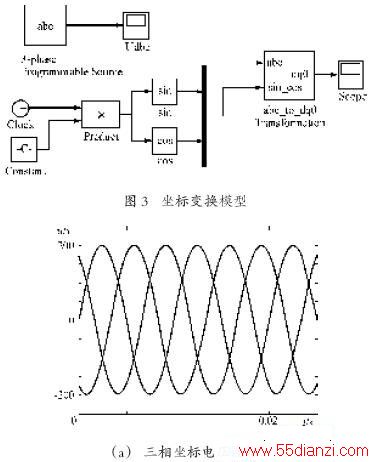
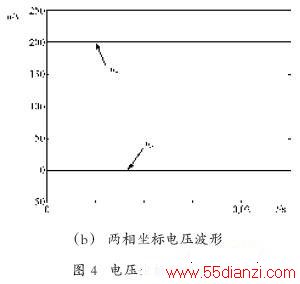
�������ྲֹ����ϵ������������ת����ϵ�ı任���䷴�任�Ѿ�������Smulink ��power system ģ�Ϳ��У���ȡ·��Ϊpower system bLOCkset / extra library / measurements / abc_to_dq0 transformation��dq0_abc transformation����Ӧ�ø�ģ��ʵ������任��������ͼ3��ʾ����������ͼ4��ʾ������ͼ4��a��Ϊ�任ǰ�������ѹ��ͼ4��b��Ϊ������任����ת��������ϵ�ϵĵ�ѹ���Σ�������ѡ��Ƶ�������Դ��Ƶ��ͬ��������������ͬ����ת����ϵ�ϵĵ�ѹ�Ѿ���ֱ����
2 ���������
�������������ǶԵ��ܽ��а�ȫ��Ч���õĺ�����֮һ��Ŀǰ����������У�������߹��˴������ʲ�������Դ����Դ�˲����ٵ���Դ��������У���͵�λ���������任�����ķ�չ���̡�ʵ�ֵ�λ���������任��Ӧ�ø��ֿ����㷨�����������п��Ƶ�Ŀ�����ڡ�
�����Ե������ӱ���װ�õ�����������ľ��嶨�����¡�
�����Ե����ԴΪ��������ѹ��г���ҿɱ�ʾΪ

3 PWM����������������ԭ��
����ͼ5ΪPWM������ģ�͵�·����ͼ5�п��Կ�����PWM ������ģ�͵�·�ɽ�����·�����ʿ��ع���·�Լ�ֱ����·��ɡ����н�����·���������綯��E�Լ�������L �ȣ�ֱ����·�������ص���RL�����ص綯��eL�ȡ�
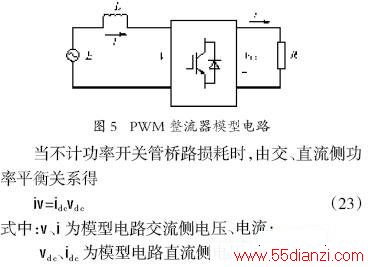
������ʽ��23��֪��ͨ����ģ�͵�·������Ŀ��ƣ��Ϳ��Կ�����ֱ���࣬��֮��Ȼ��
������̬�����£�PWM ������������ʸ����ϵ��ͼ6��ʾ�����Ե����綯��ʸ��Ϊ�ο�ʱ��ͨ�����ƽ�����ѹʸ��V ����ʵ��PWM �����������������С�����| I |���䣬���| VL |=��L| I |Ҳ�̶����䣻���Ž�������ʸ��I ����ı仯��PWM ������������ѹʸ��V �˵��˶��켣������һ����|VL| Ϊ�뾶��Բ����һ���������ɵ�PWM���������������й������£�
����1����ѹʸ��V �˵���Բ�켣AɛB ���˶�ʱ��PWM����������������״̬����ʱ��PWM��������ӵ��������й������������ʣ����ܽ�ͨ��PWM �������ɵ���������ֱ�����ء���PWM������������B��ʱ����ʵ�ֵ�λ���������������ơ�
����2������ѹʸ��V�˵���Բ�켣BɛC���˶�ʱ��PWM����������������״̬����ʱ��PWM ��������ӵ��������й������������ʣ����ܽ�ͨ��PWM �������ɵ���������ֱ�����ء�
����3������ѹʸ��V �˵���Բ�켣CɛD���˶�ʱ��PWM��������������Դ���״̬����ʱPWM����������������й������������ʣ����ܽ���PWM������ֱ���ഫ����������
���Ĺؼ��֣������� ������·��������Դ�������� - ������·����






