(1)内置自举二极管和高压电平移位器;(2)桥路电压最高可达550 V,并可直接从IC的HV脚输人高压端,为内部电路产生低压,从而无需附加低压电源;(3)输入启动延时,能够使用简单的。RC滤波器或者来自驱动器的控制信号产生延迟,振荡器的频率能够调节;(4)非交叠时间可以由自适应非交叠电路控制,最小非交叠时间可在内部固定。
1 UBA2032T的引脚结构
UBA2032T采用SO24塑料封装形式,引脚排列如图1所示。
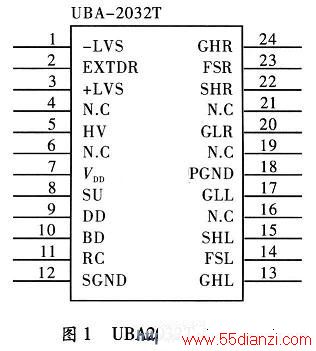
UBA2032T内部集成了电压稳压器、振荡器、输入信号延迟和桥路禁止电路、控制逻辑、高/低压电平移位器、高端左/右驱动器和低端左/右驱动器等电路。该芯片集成度高,为全桥电路的设计带来了方便。
(1)高端左边和低端右边MOSFET,右边和低端左边MOSFET截止;(2)高端左边和低端右边MOSFET,右边和低端左边MOSFET导通。
在该设计中,就是利用UBA2032T的这一互补导通和强大的驱动能力特性,使用单片机产生一定占空比的PWM信号,对负载进行驱动。
1.2 UBA2032T工作模式
UBA2032T有3种不同的振荡工作模式:
(1)内部振荡器模式。在该模式下,HV端为IC芯片进行供电,桥路的振荡频率由外部所接的电阻和电器来决定。如果要实现50%占空比,应该将DD端接SGND使能内部分频器。同时要将EXTDR与+LVS,-LVS和SGND或者VDD。管脚相连接,减少外界对不使用管脚的干扰;(2)使用外部振荡器模式。该模式下,管脚RC与SGND连接,这样可以禁止内部振荡器。如果外部信号源连接到EXTDR端时,桥路的振荡频率将由外部的输入信号决定。在使用外部振荡器时,应关闭分频器,所以将DD端接高电平。BD管脚是用来关闭全桥电路中的4个MOSFET,应接高电平使能全桥电路;(3)内部分频器和外部振荡器同时使用的模式。在该模式下,管脚RC和DD,SGND相短接。此时全桥输出频率为振荡器频率的1/2,桥路转换则通过EXTDR输入信号的下降沿触发。
1.3 UBA2032T逻辑控制表

PWM应用设计中,UBA2032T选用的是外部振荡器模式。按照表1所示,选择BD接低电平、SU和DD接高电平,这样根据外部输入信号的高低电平变化就能够在GHL,GHR,GLL,GLR管脚输出高低不同的逻辑信号。
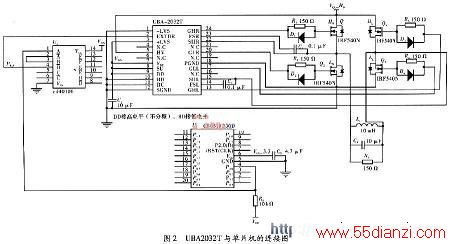
2 UBA2032T与C8051F330D在PWM电路
2.1 C8051F330D的优点
该PWM电路设计中,为了减少对硬件资源的使用和设计方便。使用C8051F330D单片机作为控制器,利用自身的PCA模块产生占空比能够改变的一定频率的低压PWM序列,选用C805lF系列单片机,具有以下优点:
(1)C805lF系列单片机是与51单片机指令集相互兼容,具有C51所有外设部件,减少了外围电路的设计。单片机内部有高/低振荡器,通过简单设置相关寄存器就能够产生系统时钟,无需外界晶振。系统时钟频率最高可达25 MHz,完全能够满足设计要求;
(2)内部PCA模块包括一个专用的16位计数器/定时器时间基准和3个可编程的捕捉/比较模块。时间基准的时钟可以是下面的6个时钟源之一:系统时钟/12、系统时钟/4、定时器0溢出、外部时钟输入(ECI)、系统时钟和外部振荡源频率/8。使用PCA功能可以产生8位或者16位PWM序列。不仅序列的占空比根据需要可以改变,而且通过选择不同的时间基准可以改变频率;
(3)对PCA的特殊功能寄存器进行简单的设置,利用软件编程的方法,在相应的端口输出PWM序列。
如果计数器/定时器的低字节PCAOL溢出(从0xFF到Ox00),保存在PCAOCPLn中的值被自动装入到PCAOCPLn不需软件干预。通过将PCAOCPMn寄存器中的ECOMn和PWM位置‘1’来使能8位脉冲宽度调制器方式。8位PWM方式的占空比由如下方程得到
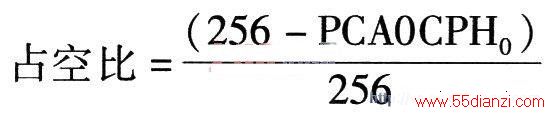
注意:当向PCA0的捕捉/比较寄存器写入一个16位数值时,应先写低字节。向PCAOCPLn的写入操作将清‘0'ECOMn位;向PCA0CPLn写入时将置'1'ECOMn位。8位脉宽调制最大占空比为100%(PCAOCPLn=0),最小占空比为0.39%(PCAOCPLn=0xFF)。可以通过清'0'ECOMn位产生0%的占空比。
设计中只输出一路PWM信号,所以只对PCAMn进行设置。C8051F330D相关寄存器及PCA寄存器的设置如下:
(1)对于C8051F330D单片机,首先使能交叉开关,并使输出端口设置为上拉,这样才能使产生的。PWM信号能够从相应的端口输出,即XBR0=Ox41;使端口P0.0作为PWM的输出端;
(2)PCA寄存器设置。要使能PCAOCN中的CR位,设置PCAOMD中的CPS0,CPS1,CPS2位选择PCA的时钟频率,根据要求选择SYSCLK/4分频;
(3)在PCAOCPM0寄存器中设置为8位。PWM,并令其中断使能,只需更改PCAOCPLn的值,就能够达到改变占空比的目的。
2.3 UAB2032T的工作过程
3 仿真结果
仿真采用NI公司的Multisim仿真软件。使用四综示波器观察仿真波形,如图3所示。
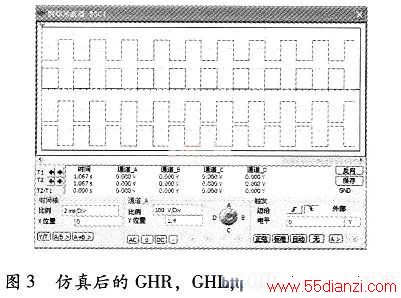
由上往下第1路代表GHL,第2路代表GHR,第3路代表GLL,第4路代表GLR。输入的PWM频率为500 Hz,HV端输入电压为100 V。通过仿真波
形发现,利用一路PWM序列的信号驱动UBA2032T,能够产生互补对称的4路驱动信号。波形比较光滑、规整,发挥了UAB2032T的全桥驱动能力。
4 结束语
由上述UBA2032T工作原理和仿真结果可以得到,采用UBA2032T驱动全桥电路,实现了对于PWM序列的驱动,达到了设计目的。采用C805-1F330D单片机与UBA2032T相结合的方法,简化了设计,减少对硬件资源的浪费。单片机内部集成的PCA模块为产生PWM带来便利。
本文关键字:暂无联系方式元器件特点及应用,元器件介绍 - 元器件特点及应用






