为了提升电流模式控制下Boost DC/DC变换器的动态响应速度,采用电流预测和无差拍控制理论对控制器进行设计。给出了线性外插的预测方法和无差拍控制策略,分析了电压环路小信号模型并设计了其控制器。采用前缘调制的预测无差拍峰值电流模式控制,电感电流可以在两个周期内调整到参考量;当占空比超过0.5时,变换器不存在次谐波振荡问题,省去了斜率补偿设计。实验结果表明,与经典电流模式控制器相比,预测无差拍控制器在控制电压上跳变2 V时,能够缩短约22.6%的调节时间;在控制电压下跳变2 V时,能够缩短约9.4%的调节时间。
1 引言
Boost DC/DC变换器的控制问题一直是国内外学术界的研究热点。由于受控对象传输函数的非线性和时变性,传统的控制方法有时不能达到预期效果,故需寻找适合Boost DC/DC变换器的先进控制理论,这包括:模型预测控制、滑模变结构控制、预测电流控制等。
此处采用无差拍控制思想,结合线性外插的预测方法,对Boost DC/DC变换器的电流环进行优化设计,该设计简单可靠,对系统参数不敏感,便于数字方式实现。仿真和实验结果表明,优化后的变换器具有良好的静、动态性能。
2 电流模式控制BOOSt DC/DC变换器
Boost DC/DC变换器是一种能够实现升压的开关电源。电流模式控制通过对电感电流的控制,提升了环路响应速度。对于理想的电流模式控制,环路传输函数已经不包括电感了,因此也就不再有LC双重极点,这就简化了电压环的补偿设计。电流模式控制方式中,峰值电流模式以其具有快速的限流作用而得到广泛应用,因此后面的讨论均基于峰值电流模式。经典的电流模式控制是将电感电流用作脉冲宽度调制器(PWM器)的斜波输入,如图1所示。
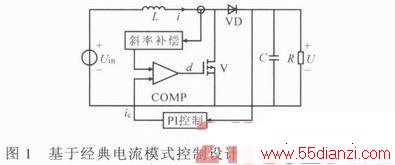
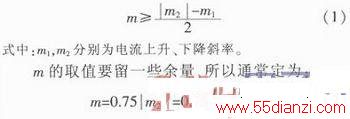
其中,d是占空比,V是开关,VD是二极管,i是电感电流,IC是控制电流。反馈电压通过PI控制器产生ic,与经过斜率补偿的i相比较,进行PWM。经典的峰值电流模式控制存在次谐波振荡的问题,这可通过斜率补偿解决。要保证补偿后的上升斜率大于下降斜率,因此补偿斜率为:
经典电流控制需要采样到连续的电感电流,不便于控制器的数字方式实现;此外,斜率补偿会增加控制电流与电感电流之间的误差,从而降低变换器的动态性能。
3 电流环的预测无差拍控制设计
预测无差拍控制作为一种离散控制理论,是指通过已知状态信息计算出下一时刻控制量,并在数个时钟周期内让目标达到控制量的一类控制方法。由于占空比的计算需使用下个周期的电流和电压状态信息,所以必须对它们进行预测。
3.1 预测方法
预测电压和电流的方法有很多,为便于变换器的数字方式实现,必须采用一种简单有效的预测方法。线性外插的预测方法不仅计算量小,每次预测过程至多需要两次乘法和一次加法,而且对变换器寄生参数不敏感,可得到较精确的预测量。线性外插的预测过程如图2所示。图中,iB1T1,iB1T2为采样电流;upre,ipre分别为预测电压、电流;uB1T1,uB1T2为采样电压。
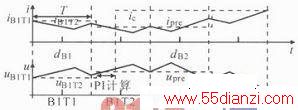
线性外插法的预测方式可表示为:
ipre=2iB1T2-iB1T1,upre=2uB1T2-uB1T1 (3)
该方法需采样两个电流值进行预测,考虑到延迟,在采样第二个值后已经不能计算当前周期的占空比,这决定了每个控制节拍必须包含两个开关周期。
3.2 控制策略
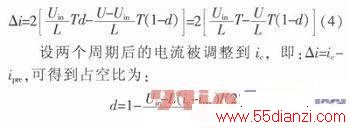
预测电压经过PI控制器得到控制电流,根据控制电流与预测电流之间的误差就可计算出下个节拍的占空比。Boost变换器电感两端的电压在开关导通期间为Uin,在开关关断期间为U-Uin,因此,经过两个相同占空比的周期,电感电流的变化量为:
与经典的峰值电流模式控制相比,预测无差拍控制可在两个开关周期内将电流调整到控制量,提升了动态响应速度;此外,采用前缘调制的变换器不存在次谐波振荡的问题,节省了斜率补偿设计;最后,线性外插的预测方法不仅计算量小,便于变换器的数字方式实现,而且对系统参数不敏感,具有很好的鲁棒性。
4 电压环控制设计
电流模式通过对电感电流的控制,改变了系统的极点,受控对象的传输函数由二阶变成了一阶,因此电压环的补偿变得简单,一般采用经典的PI控制。应用在Boost变换器中的无差拍控制结构如图3所示。
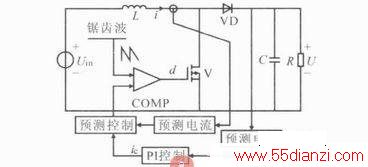
图3基于预测无差拍控制的BOOST
图中,用线性外插法得到预测电流和预测电压,用预测电流与控制电流的误差计算下个控制节拍的占空比。环路中各模块的传输函数为:G1(s)为从i到U的传输函数,G1(s)=(1-d)(-sLeq+R)/(RCs+2);G2(s)为IC到i的传输函数,G2(s)≈1;H(s)为PI控制的传输函数,H(s)=(KpTis+Kp)/(Tis);
由于电压环包括:电压预测器、PI控制器、采样器和变换器,因此其开环传输函数为:
L(s)=Hs(s)Hpre1(s)H(s)G1(s) (6)
当穿越频率fc远低于开关频率且远高于RC极点时,式(6)在fc附近可近似为:

将fc设在1/5的右半平面零点处,令式(7)的模值为1,相位裕度为63°,即可算出Ti,Kp。因为L(s)亦即理想电流模式控制下的环路传输函数,所以这样的设计同样适用于经典电流模式的PI控制。
5 仿真结果
以Boost变换器为控制对象,仿真模型参数为:Uin=6 V,U=12 V,f=50 kHz,L=250μH,C=66μF,R=40 Ω。可得到PI控制器参数:Ti= 0.000 25,Kp=1。当控制电压由11 V阶跃到12 V时,控制电流和电感电流的响应如图4a所示;采用相同的PI控制参数,设计预测无差拍控制器和经典电流模式控制器,仿真得到输出电压响应如图4b所示。
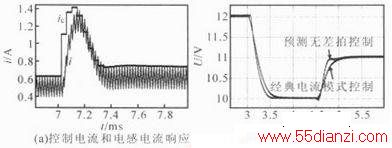
当控制电压由12 V阶跃到10 V时,预测无差拍控制器需要约0.5 ms的调节时间,而经典电流模式控制器需时约0.7 ms;当控制电压由10 V阶跃到11 V时,预测无差拍控制器需要约0.3 ms的调节时间,而经典电流模式控制器需时约0.5 ms。
6 实验结果
按照上述仿真参数构建实验系统。图5示出两种控制方式下,控制电压跳变2 V时,变换器输出直流电压U和交流电压u的响应。
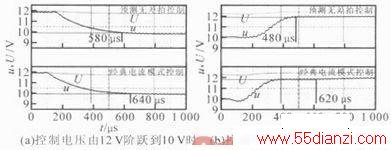
取阶跃量的5%为误差容限,则响应达到并保持在终值0.1 V波动内所需的时间就是调节时间。由图5a可知,当控制电压下跳变2 V时,预测无差拍控制器需要580μs的调节时间,而经典电流模式控制器需要640μs的调节时间。
由图5b可知,当控制电压上跳变2 V时,预测无差拍控制器需要480μs的调节时间,而经典电流模式控制器需要620μs的调节时间。实验结果表明,相比经典电流模式控制器,预测无差拍控制器在控制电压上跳变和下跳变2 V时,分别能够缩短约22.6%和9.4%的调节时间。
7 结论
此处设计了预测无差拍控制,并与经典电流模式控制进行了对比。仿真和实验结果表明,预测无差拍控制器可以改善系统动态性能。该设计方法简单可靠,对系统参数不敏感,便于数字方式实现。
本文关键字:控制器 综合-其它,单片机-工控设备 - 综合-其它






