1������
Ŀǰ������������������ص��ŵ�㷺Ӧ���ڷ�֯��ҽ����������������̨�ƹ���ơ���ҵ�Զ�����Ӧ�������ڵ������ϵͳ�У�Ҫʹ�������ʵ�־��ܿ��ƣ����˸�������������й��⣬����һ����Ҫ����ȡ������������ѡ��Ŀǰ������������Խ�IJ�������dz��������ԣ����õ�������ѡ���Լ۱���ԸߵIJ��������һƬ�Լ۱ȸߵ�������������������ʵ�־��ܿ��ơ�Rohm��˾��BD6384��һ�����˫H�ŵ����ಽ���������оƬ�����õ��迹DMOS���գ��봫ͳ��BJT������ȣ����з�����С��Ч�ʸߵ��ص㣬��˱��㷺Ӧ���ڷ�֯��������ҽ������������
�������Ƚ�����BD6384�������ص㣬Ȼ���ص���������˾������BD6384�������DEMO�壬���������Ա���ж��ο�������ʡ�з����ڡ�
2.BD6384�����ص�
BD6384��һ�����˫�ŵ����ಽ���������оƬ������PWM����������ʽ��������������ɴ�1.5A��BD6384�����������벽��1/4������ģʽ��������п�ѡ�ĵ���˥��ģʽѡ����Ӧ�÷�����е��ڡ�
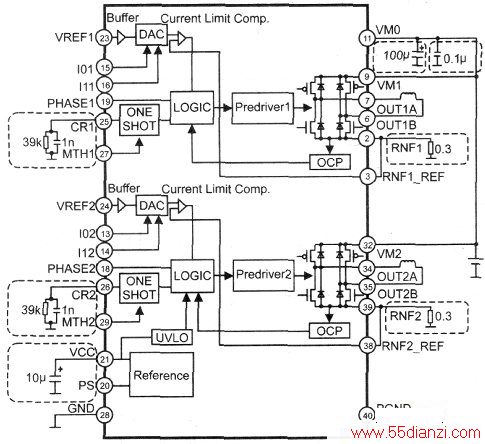
BD6384��Ҫ�Ĺ����ص����£��ٵ��迹��DMOS���գ��ھ������߹��ܣ��۹��¹ض�(TSD)���ܣ���Ƿѹ����(UVLO)���ݵ���˥��ģʽ��ѡ����������(OCP)���߷�װС��ɢ�Ⱥá��ڲ���ͼ����ͼ��ʾ����ϸ���Ͽɵ�ROHM�ٷ���վ���ػ��������﹫˾��ȡ��
3��BD6384����ģʽ
��BD6384�����������벽��1/4���ȶ��ֹ���ģʽ�������ͨ��������ƣ��ڲο���ѹVREF1��VREF2�˿����������źţ�ʵ�����ҿ��ơ�
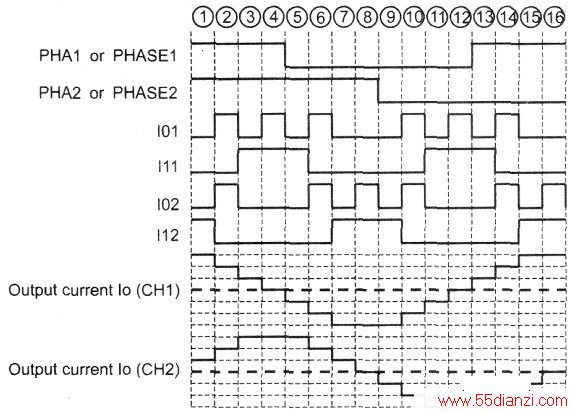
��1/4������ģʽ��һ�����ಽ��������з���Ϊ����ʱ�����ͼ����ͼ��ʾ�����һ����λ��������Ҫ����16��������������ʵ��Ӧ�ù����У�PHASE1��PHASE2Ϊ��λ���ƽţ�101��I11ΪPHASE1��Ӧ��H�ŵĵ������ƽţ�I02��I12ΪPHASE2��Ӧ��H�ŵĵ������ƽš�ͨ�����Ƹ�6�����Ų�ͬʱ��ĵ�ƽ������ɶԵ�����������벽��1/4��ģʽ���ơ��������ʱ��ÿ������������������˳�����±���ʾ��
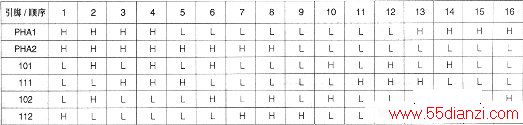
������1��ÿ�����ŷ���16����ƽ�����ź�ʱ�����ಽ������պ�ת��һ����λ���ڣ���ʱ����˵ĵ���������ͼ2�е�CH1��CH2��ʾ��ʵ�ֶԵ����ϸ�ֿ��ơ�4��BD6384�������DEMO����Ϊ���õ���ʾBD6384�Ŀ������ܣ������﹫˾�ڻ���MSP430FG413�����ϣ������BD6384������ʾDEMO������DEMO��Ϊ���ذ弰BD6384С���������֣�ͨ��������������ʵ�ֶԵ��״̬�Ŀ��ƣ�������ģʽ���벽ģʽ��1/4��ģʽ�����١����١������ȡ������ͼ����ͼ��ʾ��
4.1DEMOӲ����·���
4.1.1BD6384С���·
��DEMO��BD6384������Χ��·�����ذ�ֿ���������չ��ƣ�BD6384С���·ͼ����ͼ��ʾ��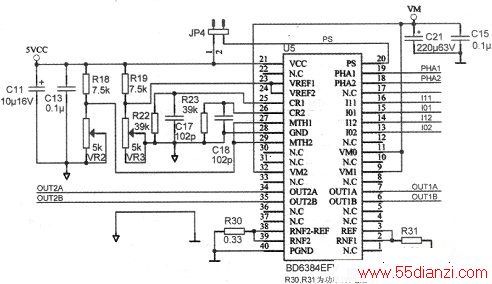
BD6384��������Դ��һ���ǵ��������ѹVM������һ������������ѹVCC����ϵͳVMѡ��24V��VCCΪ5V��
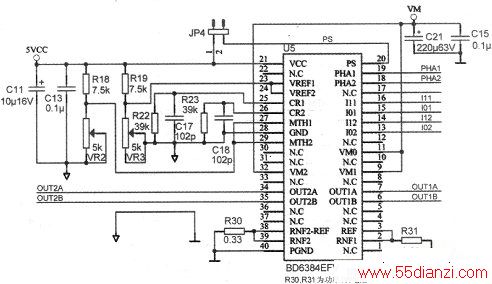
��ͼ�У�CR1��CR2ΪRC��·�������ţ�ΪPWM�ṩ���Σ�RC��·�еĵ���R����̫С��̫С��ﲻ���趨��0.9V�ĵ�ѹ����ʹ��������ܵ�Ӱ�죬�Ƽ�R��ֵ��15K��100K��Χ�ڣ�ͬʱRC��·�еĵ���C����ѡ��̫��̫��������������ʱ�佫������ʹ����������ڵ�������ֵ���Ӷ����ܻ��оƬ������ȴ�����һ���Ƽ���470pF��3300pF֮�䡣�����Ӧ�ó��ϣ�R��Cֵ�ֱ�ѡ��39K��lOOOpF���ݣ�һ������£�������������������ֵ��
BD6384���趨�����ʱ���������С������IJο���ѹVREF����������RNF�йأ��ڵ���100%���������£�����������С�ɸ��ݹ�ʽIo=VREF/RNF/5(A)���㡣�ο���ѹ��С��ͨ������VR3�ı䣬�趨���뷶ΧӦ��0.0��2.0V�ڣ����ο���ѹ����2.OVʱ�����������С�ɰ���ʽ�ó�����ˣ������ʱ��Ӧ�ϸ���Ʋο���ѹ�������С����������RNF(��Ӧͼ��R30��R31)ѡȡʱ���Ƽ�0.3��1.0����ң������∪&raDIC;���̫�����ʹϵͳ�������ӣ�Ч�ʽ��͡?
BD6384��Ϊ�졢����������ֵ���˥��ģʽ����Ҳ����һ���ص�֮һ��ͨ���ı�MTH1��MTH2��ƽ��С����ѡ��ͬ��˥��ģʽ���Ա�DEMOΪ����ͨ������VR2����ѡ�����˥��ģʽ��0��0.3V��˥��ģʽ��0.4��0.9V���˥��ģʽ��1.5��2V��˥��ģʽ����������£���BD6384ѡ���ڻ��˥��ģʽ�¡�
OUTIA��OUTIB��OUT2A��OUT2B�����ಽ�����������ӡ�
4.1.2���ذ��·���
BD6384���ذ��·��Ҫ�е�Դ��·������MCU��Χ��·��������·���ӿڵ���ɡ�
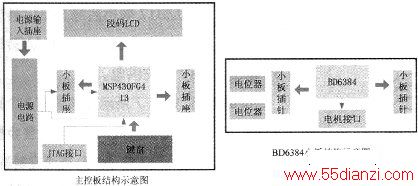
������оƬ��·����TI��˾��MSP430FG413��FG413����LCD������������ʵ��BD6384�������Ƽ���ǰ״ָ̬ʾ������ͼ��ʾ��
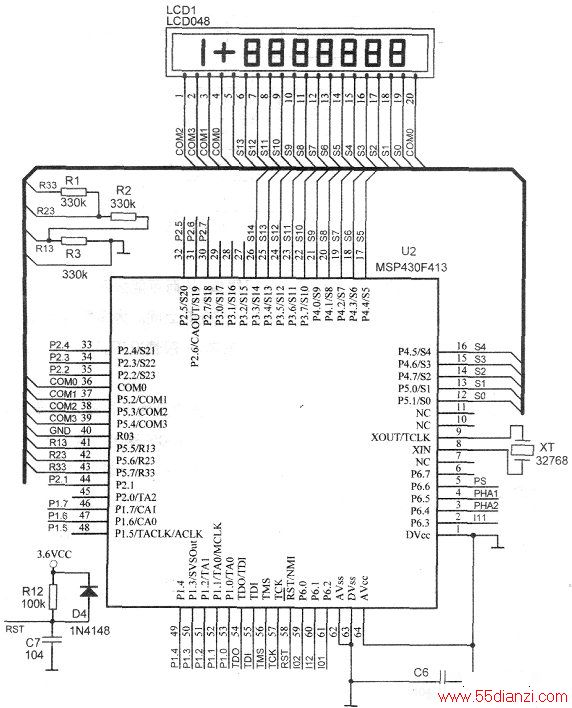
��·��LCDѡ��1/4DUTY�Ķ���LCD������ͼLCD������ʾ��MSP430F413��Ӧ��LCD��������Χ��·�����ͼ��Rl��R2��R3�ⲿ����Ƶ�·��3��������ֵ��ѡ��330K���������32768��ͨ���ڲ���Ƶ����Ƶ8MHz��Ϊϵͳ��MCLK��
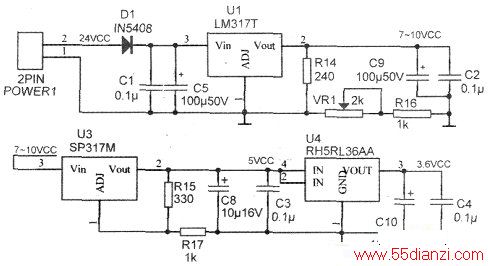
�ڵ�Դ���ֵ�·����ͼ��ʾ�����Ϊ24V���������ͨ��PCB�����ߣ���24Vֱ�����뵽VM���Ż��LM317T����ˣ�7��10VCC�㣩���ӵ�BD6D6384��VM���ṩ�����Դ��LM317�����SP317ת��5VΪ5Vϵͳ���磬�پ�RH5RL36AAת��3.6V�����Ϊ3Vϵͳ���硣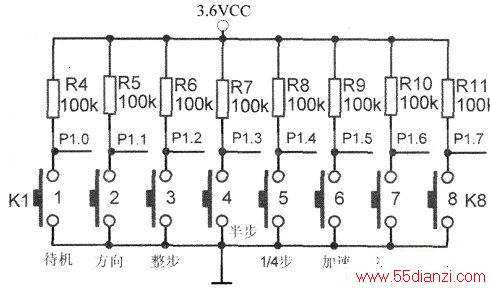
�۰�����·����ͼ��ʾ��������8��������������ʵ�ִ���ѡ����ѡ������ģʽ���벽ģʽ��1/4��ģʽ�����١����ٿ��Ƶȡ�������ʾBD6384�Ե����һЩ�������ơ�
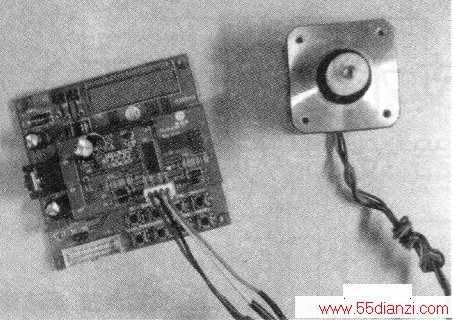
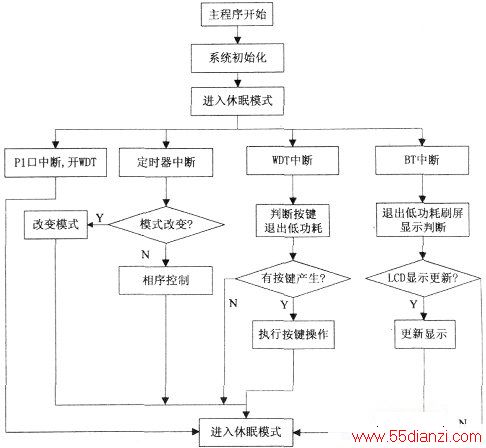
���⣬��ϵͳ������صĽӿڣ����IJ�����ϸ˵����DEMOʵ��ͼ����ͼ��ʾ��4.2������Ʊ�DEMO��������������ǻ���IAR������ͨ��C���Ա��ʵ�֡�����������Ҫ���������ӳ����жϷ��������ɡ���������Ҫ�Ը�������ģ����г�ʼ�����������̴�����LCD��ʾ���̴����ȡ��жϳ�����Ҫ��I/O�жϡ���ʱ��TIMERA�жϡ�WDT�жϡ�BT�жϵȷ�������ɣ����ڴ�����Ӧ�Ľ��̡������������ͼ����ͼ��ʾ��
5������
ROHM��˾��BD6384��һ������ܵIJ����������оƬ�����������չʾ��BD6384�����ಽ��������Ƶ�������ʾ��Ϊ������Ա�ṩ�����ݵ����ಽ��������Ʒ���������Բ���������Ƶ��˽⡣
���Ĺؼ��֣�������� �ۺ�-��������Ƭ��-�����豸 - �ۺ�-����






