随着社会暴力犯罪和恐怖活动呈上升趋势,士兵面临的威胁更突然、直接、致命,这对部队人员使用的武器装备提出了更高要求。战场无人装备作为一种功能强大、反应迅速、代价低廉、应用广泛的多技术融合体,渐渐步人人们的视野。为了能够实现移动战场无人装备的自主避障导航,必须建立移动战场无人装备的测距避障导航系统。用于战场无人装备测距避障的实现方法有多种,主要有超声避障、视觉避障、红外传感器、激光避障、微波雷达等避障方法。其中超声波传感器以其信息处理简单、技术成熟、运行可靠、速度快、性价比高和硬件实现方便等优势,被广泛地应用到移动战场无人装备的感知系统中。
以微控制器为核心的智能数据采集系统的兴起,超声波检测装置在其检测精度、手段、应用范围上实现了新的飞跃,广泛应用于智能化检测和机器人导航等领域。文中介绍了一种以单片机为主控芯片,采用多组超声波传感器采集障碍物信息,结合温度补偿原则,实现精确测距。该测距系统结合模糊控制避障算法,在自行设计的武装机动平台上得到实际应用,实现了武装机动平台的安全避障。
1 超声波测距原理
超声波测距技术是一种非接触式的测量物体间距离的方法。它是基于无目视能力的生物防御及捕捉猎物生存的原理。通过不断检测超声波发射后遇到障碍物所反射的回波时间,计算运动物体与障碍物间的距离。对距离的测定通常采用渡越时间法,即利用超声波探头向某一方向发射出超声波,在发射的同时开始计时,当超声波在介质中碰到被测物体,就会发生反射,探头接收到反射波后立即停止计时,从而计算
出发射和接收回波的时间差△t,继而根据超声波在介质中的传播速度C,计算出发射点到被测物之间的距离d=C×△t/2。
超声波在空气中的传播速度和温度有关,为了获得较精确的声速,必须引入温度补偿。对空气而言,本文采用超声波速度C与环境温度T的关系按如下公式计算:![]() 。硬件设计中加入温度补偿电路,本文采用温度传感器DS18B20采集环境温度送给单片机进行温度补偿,以修正声速。
。硬件设计中加入温度补偿电路,本文采用温度传感器DS18B20采集环境温度送给单片机进行温度补偿,以修正声速。
2 测距避障系统总体设计
武装机动平台由运动行走子系统、火力控制子系统、侦察子系统、测距避障子系统组成,总体采用分级式控制方式,各子系统在中央处理器控制下完成相应工作。测距避障子系统是武装机动平台重要组成部分,在硬件设计上,采用主、从机结构,从机主要完成测距数据的采集处理,主机根据从机采集的距离信息完成复杂的避障算法,控制机器人的行走。从机主控芯片采用STC12C5412AD单片机,4组超声波收发
传感器采集障碍物信息,DS18B20温度传感器测定环境温度,液晶1602显示4组测定距离和环境温度,其总体设计框图如图1所示。

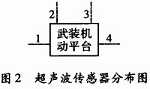
编号1、2、3、4分别代表4组超声波传感器,武装机动平台的左右两侧各安装1组,前方安装两组,分别用于感知各自方向上的障碍物信息,超声波传感器在武装机动平台上的分布如图2所示。
温度传感器DS18B20用于感知环境温度,把采集到的环境温度送给单片机作温度补偿,提高测量障碍物与武装机动平台距离的精度,实现精准避障。
武装机动平台避障运动分为4种情况:(a)只有1、2两组超声波检测到障碍物,此时小车向右运动,若3、4组测到障碍物则向相反方向运动。(b)当前方发现障碍物,1、4组均未检测的障碍物时,令小车向右运动。(c)当4组超声波都测到障碍物时,小车先倒退,然后向右运动。(d)若1、4检测到障碍物而2、3没有检测到障碍物,小车并不改变方向仍按直线行走。
www.55dianzi.com
3 测距避障系统硬件电路设计
3.1 超声波发射电路
超声波发射电路如图3所示。它由超声波波形产生电路、功率放大电路和发射控制电路3部分组成。由于4组超声波传感器需要实现功能相同,电路基本一样,只是控制电路端口改变,因此只对一组超声波收发器的功能实现作介绍。选单片机的端口P1.0为控制信号线,控制触发NE555时基振荡电路产生频率为40 kHz的方波信号,其振荡频率计算公式如式(1)所示。
![]()
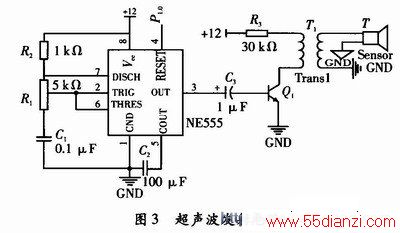
由于发出的超声波信号达不到用于测量所需的强度,且随着测量距离的增加,超声波在空气中的损耗也不断增加,经反射接收到的回波信号十分微弱,不利于从大量杂信号中提取出来。为了提高探测的准确性,在超声波传感器与NE555输出端加上电压放大电路,对产生的信号进行放大,提高方波信号的电压值及强度,本系统的最大测距范围为15 m,由于在软件设计中使用了抗反射波直接被接收的限制,最近测距范围为20 cm。
3.2 超声波接收电路
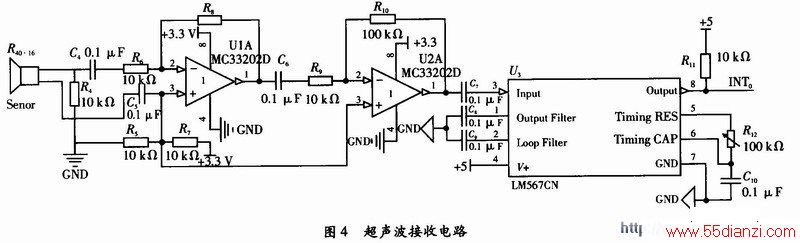
超声波接收电路如图4所示。它由超声波接收换能器、运算放大器、选频电路及多路选通开关等部分组成。由于回波在接收传感器经压电效应产生的电压信号是mV级,所以接收到的回波信号必须经放大电路放大后才能由下一级的选频检测电路处理。放大电路采用MC33202D集成运算放大器,第一级放大100倍,第二级放大10倍。选频电路由音频译码器LM567CN实现,其5、6脚外接的电阻和电容决定了内部振荡器的中心频率fo,fo≈1/(1.1R1C1)。当Input端接收到的信号中有接近LM567设定的频率且具有一定幅值的回波时,LM567的输出引脚OUTPUT
由高电平变为低电平,此低电平信号被连接到STC12C5412AD单片机的INT0引脚触发中断。STC12C5412AD单片机在发射超声波时启动定时器,
在中断产生时关闭定时器,从而得到超声波传播的时间△t,计算武装机动平台与障碍物的距离。
3.3 温度测量电路
超声波在空气中传播时,大气压力、空气的温度、湿度等都影响其速度,其中空气的温度对超声波声速影响最大。为了得到更准确的超声波声速,本系统设计了温度检测部分对环境温度进行检测,以提高超声测距精度。测量环境温度时,直接以“一线总线”的数字方式传输,可以提高系统的抗干扰性。为此,本系统采用了DS18B20温度传感器检测环境温度,它具有结构简单、体积小、功耗小、抗干扰能力强、使用简单等优点。其温度测量范围为-55~125℃,测量分辨率为0.5℃,微处理器接口简单,输出为温度值的9位(二进制)数据读数。可方
便地实现超声波声速的温度补偿,从而提高测量的准确度。
www.55dianzi.com
4 测距避障系统软件设计
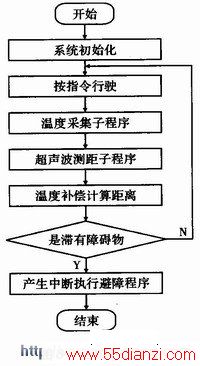
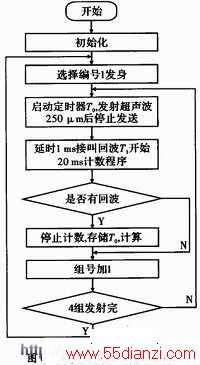
超声波测距系统的软件由主程序、超声测距子程序、温度数据采集子程序、显示子程序等组成。主程序和超声测距子程序的流程图分别如图5和图6所示。主程序首先在上电复位后,完成STC12C5412AD单片机及其外围功能模块的初始化。然后调用温度采集控制程序,读取当前温度值,并利用温度补偿程序,计算出当前温度下超声波的波速。接着依次启动4路超声波的发射,在超声波发射过程中,屏蔽接收电路向单片机输入信号。同时,使能定时器T1开始计时。超声波每次发射10个周期的信号,耗时为250μs。由于超声波在发射过程中会产生余波,同时
超声波发射传感器与接收传感器相距较近,所以发射时会有部分余波未经反射直接绕射到超声波接收传感器上,引起系统误差。为了避免误差,采用延迟接收的方法,在超声波发射完1ms后开放接收电路,并使能外部中断,调用延时程序,等待超声波回波,所以存在20 cm范围内盲区。若有回波,则引起中断,调用中断服务程序,读取T1计数值,经处理后,计算出距离,送LED显示,同时把计算距离送至避障子程序入口,产生相应的避障指令,控制机动平台的左转、右转、前进、倒退等动作。
本文关键字:武装 综合-其它,单片机-工控设备 - 综合-其它
上一篇:单片机的扩展RAM读写时序






