吊车是工厂、车间中一种常用的搬运工具。其动力一般是交流电动机。吊车在空间可进行上、下、左、右、前、后的运行。控制吊车的方法一般有两种:一种是操作人员在悬挂于吊车横梁上的操作室进行控制;另一种是将控制电机的按钮用控制线引到地面,操作人员在地面进行控制。但在工作中,感到这两种方法都不方便,于是就设计了用红外遥控方式控制吊车系统。
一、工作原理
本系统由红外线发射机(简称发射机)和红外接收机(简称接收机)组成。发射机和接收机中均有8031单片机,具有全双工的串行接口。两机之间就是靠该串行口进行通信的。
本遥控装置的两个8031单片机靠红外光传递信息。发射机串行口输出端驱动红外发光二极管,将数字信息变成红外光脉冲信号发射出去。红外检波放大器将红外光信号还原为数字信号,送至接收串行输入端,经8031识别处理后,做出相应的控制。
8031单片机的串行接口有四种工作方式。本系统采用了方式1,即波特率可变的8位异步通信方式。考虑到红外发光二极管和红外检波器的开关时间,我们将传输波特率定为1 250 b/s。
发射机8031的串行口定义为方式1输出,将键盘输入的指令转变为一帧信息,控制红外发光管的导通与截止,使信息发射出去。
接收机8031的串行口定义为方式1输入,接收经红外检波器转换后的数字信息。
二、系统硬件电路及程序设计
1.发射机的硬件电路及程序设计
红外遥控发射机电气原理图见图1- 70。

由8031、74LS373和2732EPROM、晶振、复位电路等构成8031最小系统。4×4键盘连至8031的Pl口上,P1.o~Pl.3设定为输出,P1.4~P1.7设定为输入,用查询方式扫描键盘。
虚线框中是红外光发射电路。D1、D2是红外发光二极管;D3是红外发光二极管作为指示器。它们均由三极管T来驱动。串行口输出端( TxD)经反相器控制三极管T的导通与截止。当TxD =0时,T导通,Dl、D2、I]3发光;当TxD =1时,T截止,D1、D2、D3中没有电流通过,不发光。
红外遥控发射机的程序框图见图1- 71。

2.接收机的硬件电路及程序设计
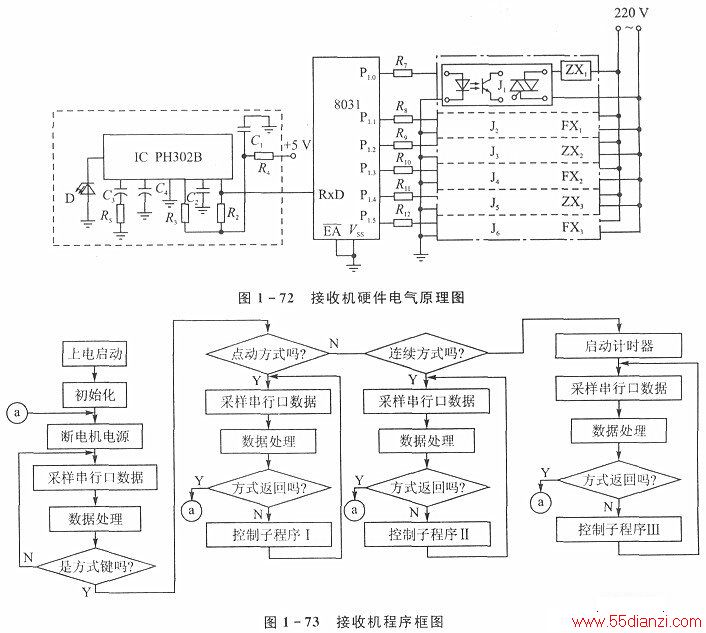
接收机除8031单片机部分外,还有红外信号接收部分和控制输出部分。图1- 72是接收机的电气原理图。
虚线框中是红外接收机部分电路图。D是红外检波二极管,IC PH302B是红外放大器。红外光信号经检波、放大后送到8031单片机串行口的输入端(RxD)。当有足够的红外光照射到D时,IC的7端从1变为O。
接收机8031的Pl口作为输出控制接口。P1.0~P1.6控制6个固体继电器J1~J6。固体继电器是一种新型的适合于微机控制的继电器。其内部有光电耦合器和双向可控硅,隔断了微机系统与主电路的电气联系,且通、断时不会产生电火花而给微机带来不良后果。J1-J6的输出端可直接作为接触器线圈的控制开关。J1j2、J3J4和Js图1- 71发射机程序流程图J6分别控制三台电机的正、反转,而每个电机正、反向的闭锁和三个
电机间的相互闭锁都是由软件来完成的。这样不但节省了很多继电器,缩小了控制盘的体积,更主要的是去掉了发生故障的隐患。接收机程序框图见图1- 73。
三、操作方式
红外遥控发射机可通过3种方式控制吊车运行:
●点动方式这是原系统的控制方法,即按下键就启动电机,直到松开为止;
●连续方式按一次键,则执行该键的操作,再按一次,则停止该操作;
●示教方式 操作人员用点动或连续运动方式把吊车运行过程“教”给吊车,吊车会把该
过程记下来,之后,便可以自动重复运行。该方式特别适用于重复性搬运。
本摇控装置的控制距离大于80 m,控制角度不小于120。(亦可设计成全方位的),很适合于短距离遥控。通过提高红外发光管的发射功率和增加红外接收回路的放大级数,可以增大控制距离。






