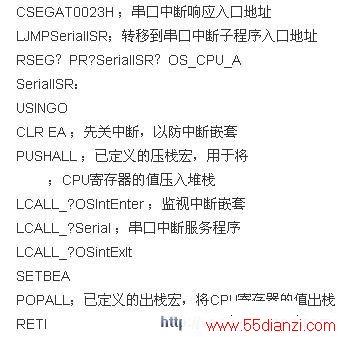
1 ��C��OS-II���жϴ�����51ϵ�е�Ƭ���ж�ϵͳ����
��C��OS-II�жϷ������(I
SR)һ���û�����Ա�д���������жϷ������IJ��衣
����ȫ��CPU�Ĵ�����
����OSIntEnter()��OSIntNesting(ȫ�ֱ���)ֱ�Ӽ�1��
ִ���û��������жϷ���
����0SIntExit()��
�ָ�����CPU�Ĵ�����
ִ���жϷ���ָ�
��C��OS-II�ṩ����ISR���ں˽ӿں�����OSIntEnter������OSIntExit������OSIntEnter����֪ͨ��C��OS��II�ˣ��жϷ������ʼ�ˡ���ʵ�ϣ��˺������Ĺ����ǰ�һ��ȫ�ֱ���OSIntNesting��1�����ж�Ƕ����������ȷ�������жϴ�����ɺ�����������ȡ���һ���ӿں���OSIntExit������֪ͨ�ںˣ��жϷ����ѽ�����������Ӧ������˻ر��жϵ㣨������һ����������DZ�Ƕ���жϷ���������ں���������ȡ�
�û���д��ISR���뱻��װ��ijһλ�ã��Ա��жϷ�����CPU������Ӧ���жϺ�����ȷ�ķ����������ʵʱ����ϵͳ���ṩ�˰�װ��ж���жϷ�������API�ӿں���������C��OS��II�ں�û���ṩ���ƵĽӿں�������Ҫ�û��ڶ�CPU����ֲ���Լ�ʵ�֡���Щ�ӿں���������Ӳ�������йأ���������51��Ƭ���µ��жϴ����Դ���ϸ˵����
51��Ƭ�����жϻ����������£�CPU��ÿ���������ڵ�S5P2ʱ�̲����жϱ�־��������һָ�����ڽ��Բ������жϽ��в�ѯ��������ж������������ȼ��ߵ͵�ԭ����д�������Ӧ�ж�ʱ��������Ӧ�����ȼ������������Ӧλ������ͬ����ͼ��жϣ�Ȼ������ж�Դ�����Ӳ�������£����жϵ�ַѹ���ջ����ת����Ӧ���ж�������ڵ�Ԫ��ͨ������ڵ�Ԫ����һ��תָ�ת��ִ���жϷ������ִ���жϷ���ָ��RETIʱ������Ӧ�ж�ʱ����λ�����ȼ������������Ӷ�ջ�е����������Ķϵ��ַ��װ����������PC��CPU����ԭ�����жϴ�����ִ�г���
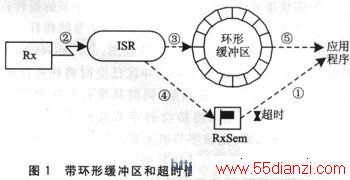
�����жϵ�����ISR��UART�Ľ��ջ�����SBUF�ж�����յ��ֽ�(��)��������ջ�����(��)��Ȼ��ͨ�������ź��������û�����˵Ķ�����(�ܡ���)�������������У����Բ�ѯ��¼�������е�ǰ�ֽ����ı���ֵ���˱����������ջ������Ƿ�������UART�յ����ݲ������˽����жϣ��������ʱ�����������ģ���ô�����յ����ַ����������Ĵ�СӦ�������ã��������ݶ�ʧ�Ŀ����ԣ���Ҫ����洢�ռ���˷ѡ�
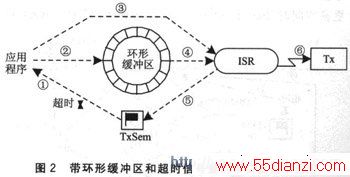
ͼ2Ϊ�����λ������ͳ�ʱ�ź����Ĵ��ڷ���ʾ��ͼ�������ź�����ʼֵ��Ϊ���ͻ������Ĵ�С����ʾ�������ѿգ����ҹرշ����жϡ���������ʱ���û��������ź����ϵȴ�(��)��������ͻ�����δ�����û��������ͻ�������д������(��)�����д����Ƿ��ͻ������еĵ�һ���ֽڣ������������ж�(��)��Ȼ����ISR�ӷ��ͻ�������ȡ������д����ֽ������UART(��)����������ִ�������һ�εķ����жϣ����ѭ��ֱ�����ͻ����������һ���ֽڱ�ȡ�ߣ����¹رշ����жϡ���ISR��UART�����ͬʱ�����ź������ź�(��)����������ݴ��ź�������ֵ���˽ⷢ�ͻ��������Ƿ��пռ䡣
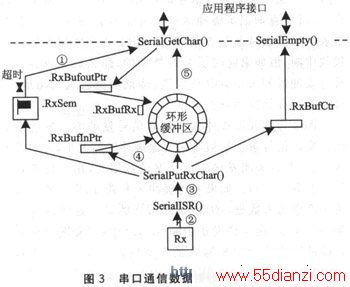
3 ����ͨ��ģ������
ÿ�����ж˿���������״���л�������ͬʱ�������ź�����һ������ָʾ�����ֽڣ���һ������ָʾ�����ֽڡ�ÿ����״�������������ĸ�Ҫ�أ�
��洢����(INT8U����)��
�������״�������ֽ����ļ�������
��״��������ָ�����õ���һ�ֽڵ�ָ�룻 &
www.55dianzi.com
nbsp;
��״��������ָ��ȡ������һ�ֽڵ�ָ�롣
��һƪ����Ƭ���е�WDT�о�






