为了稳定精确地将病人术后腹腔内积累的各种脏器分泌液排出体外,提出一种基于嵌入式系统的负压吸引器。该系统采用气压传感器、重力感应器、PH值传感器、电磁阀和薄膜泵等模块,通过检测病人体内的腔压来调整负压实现体液的引流,并能实时监控病人排出液的各项参数。经过测试,该系统能动态控制负压引流并精确测量排出体液的参数,具有稳定可靠的特性。
由于很多病人手术后脏器创口没有得到有效的愈合,此时会在腹腔内积累各种液体。最为常见的就是在临床中,为了保证肠道患者在术后能尽快康复,就需要将来自胃的低PH值的消化液借助引流设备排出体外。目前国内外市场上通常使用一次性负压吸引袋或机械式吸引器将体液引流至体外。但是这种方法产生的负压并不稳定,吸引的压强可能会有较大的变化,导致负压吸引的效果不理想。同时一次性负压吸引袋的后期垃圾处理较为复杂,如果处理不当,易造成较大污染。最重要的是,传统方式气密性不理想,容易造成倒灌而造成患者的二次感染。
相比之下,嵌入式系统通过检测体内腔压的方式控制引流,能动态控制负压大小,也能实时监控病人的体液的各种参数,稳定性好。同时具有自动清洗的功能,操作便捷。并能在液晶显示屏上显示有好的界面,实时更新病人排出体液的PH值、体积、流速、质量等参数。同时,本系统提供了友好的操作界面。医护人员可以通过选择不同的手术类型设置负压引流的类型。为了保障病人的安全,该系统还能检测异常情况,产生报警信号,并及时将报警信息通过网络传递至急救中心。
1 系统设计原理
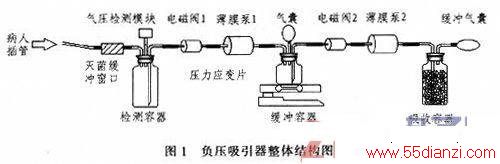
术后引流负压吸引器整体上是利用气压检测模块检测体内腔压,并使用两级电磁阀及薄膜泵的组合动态控制体内腔压,流速等关键性能指标。
灭菌缓冲接口:将通过该接口的病人腔内液体做前级灭菌、过滤及隔离处理。
气压检测模块:通过测量检测容器内的气压得出与管子连通的病人体内的压强。
缓冲容器:用于装载一个周期时间内病人分泌的体液。这一级缓冲主要用于对当前流量的进行检测。该容器装载在重力检测模块上,能精确测量缓冲容器前后的质量变化,并由此得出排出液的质量。再利用人体体液参数计算出病人排出的体液的体积。
缓冲容器所接的气囊:用于防止容器的内压过大。
薄膜泵:一种离心水泵,适用于输送高腐蚀、固液两相介质,也是目前世界上最为先进的料浆输送设备。由于病人术后的体内废液可能会有较为复杂的成分(如渗漏的消化液),有时会有较低的pH值,因此薄膜泵是本系统最好的选择。
电磁阀:具有良好的气密性,可以防止微漏,起到第二重保护作用,在薄膜泵完全开启并开始工作之前,可能会瞬时出现后级的压强暂时大于前级的压强的情况,使用电磁阀可以防止后级的液体倒灌到前级进入病人的体内,有效保障了病人的健康。
吸收容器:含有弱碱性吸收剂,可以有效吸收来自缓冲容器的体液并中和酸性。
2 系统硬件设计
负压吸引器系统主要由机械引流模块、功率驱动电路、传感器检测模块、电源管理模块、人机交互模块、报警模块与主控模块构成。其系统框图如图2所示。

2.1 机械部分设计
主要由薄膜泵、电磁阀、计量集液瓶(缓冲容器)、支架和连接导管构成。
根据现有科研数据,肠胃道术后对患者进行负压引流时最佳负压大小为-7~-5 kPa,系统使用容器截面积约为24cm2,使用P09A12R型薄膜泵,可实现至少-7 kPa的负压。电磁阀采用BOSUN-2W250-25-DC12V型电磁阀,具有良好的气密性。经测试,采用这两款薄膜泵和电磁阀能够实现最高8 mL/s抽取速度,完全能够满足对病人体液的抽取。
2.2 功率驱动部分设计
负责执行主控模块对机械部分薄膜泵和电磁阀的控制。
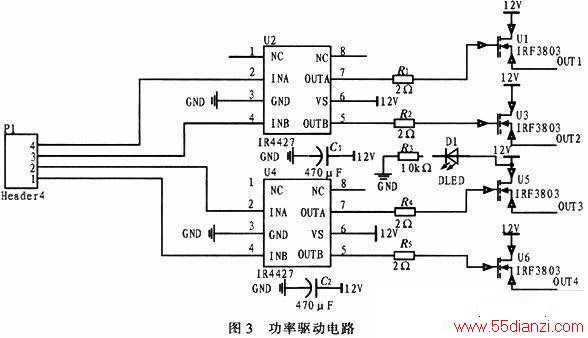
同时也起到了对控制模块和机械模块之间的隔离作用,防止强电串扰至弱电毁坏控制电路。使用4个NPN型MOS管IRF3205(Vdss=55 V,导通电阻Rds=0.8 mΩ,极限电流80 A)驱动薄膜泵和电磁阀并使用IR4427实现主控模块对MOS管的驱动。
2.3 传感器检测部分
由称重传感器、表压传感器、pH值传感器等传感器件构成,主要完成对病人腔压、负压吸引器产生的负压、体液的抽取速度、以及其它医学参数(如体液的pN值等)的测量。
称重传感器设计:压力应变片内部电桥阻值分布能够根据外部压力的大小而线性变化。采用20 kg压力应变片与信号调理电路实现。变化范围仅有50μV左右。首先使用精密仪放INA118构成前级信号放大,将信号放大5 000倍,再用通用运放LM358对信号做进一步放大和电平调整,使所称重量在0~100 g间变化时输出电压范围为0.2~2.5 V,方便主控模块使用AD采样。
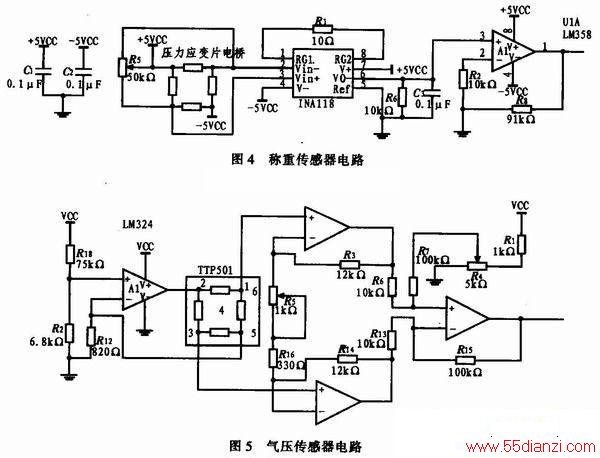
气压传感器设计:气压传感器用于对负压吸引器产生的负压进行精确舅量,使用亚科电子科技公司的TTP501型气压传感器,一种桥式硅压阻器件,其压力测量范围为0~120kPa,工作电流为0.3 mA,输出电压范围为0.5~3 V,精度高于1%。利用此传感器可以实现对负压的精确测量。
pH值传感器设计:体液pH值为医学中的重要参数,对pH值的精确测量可以有效监控患者的体内代谢状况。使用有高电压PMOS管和高压二极管优点的运放CA3140组成双高阻差分输入电路以减小共模信号的干扰。输出电压:V0=(1+2R4/Rg)·(R3/R2)·(V2-V1)。
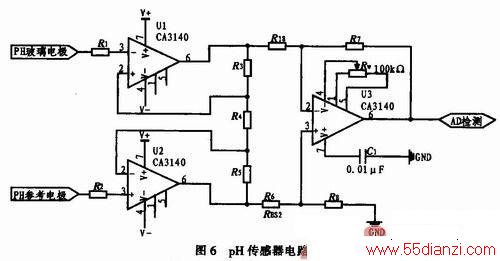
同时应用DS18B20数字温度传感器结合软件的设计完成温度补偿以提高测量精度。pH计的功耗约100 mW。测量精度可达±0.01 pH。
2.4 控制部分
人机交互模块:用于用户指令的输入,显示所测量的体内体液参数。显示模块使用诺基亚5110液晶显示屏实现,与主控模块之间的通信通过SPI接口实现,具有功耗低、控制简便等优点。
异常报警模块:主要由有源蜂鸣器及一个NPN型三极管8050构成。当主控模块输出报警信号时,给8050基极施加高电平,有源蜂鸣器发出洪亮的报警声,提示医护人员进行相应操作。
主控模块:主要以STM32为核心,完成本系统的数据分析、功能控制、显示及针对系统数据的反馈处理。STM32 F103是一款32位单片机,AD数据采集的精度极高。具有2个12位AD转换器(16通道)以及6路PWM输出和7个定时器,足以实现对各功能模块的自动控制、信号采集和处理。
3 系统软件设计
本系统软件开发是基于Keil for ARM的开发环境下完成的。主要使用C语言编写。软件包括各个模块的底层驱动及数据的采集和处理。系统软件流程图如图7所示。
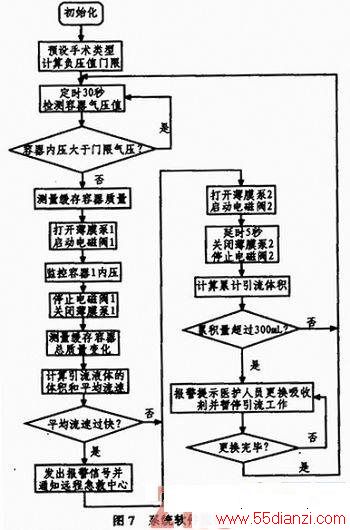
系统上电初始化,使用定时中断方式扫描按键输入,并定时在液晶显示屏上更新显示当前的瓶内气压、总流量、平均流速、pH值等参数。这部分程序在中断函数中,已在主体部分流程图中省略。
系统工作之前先由医护人员选择脏器手术类型,系统会据所需的负压引流的门限压强每30 s检测一次检测容器的气压,并动态控制薄膜泵引流体液,以保证瓶内稳定的负压。当瓶内的气压大于门限气压时,系统依次打开薄膜泵1和电磁阀1,以防止瞬间的倒灌现象。
当液体被抽到缓冲容器中后,STM32使用12位AD采样称重传感器模块输出的信号并计算得出每次注入的体液的质量,并计算体液所占的体积。最后,控制后级的薄膜泵2和电磁阀2将称量后的体液注入吸收容器之中。并累加计算吸收容器吸收的液体体积,能及时提醒医护人员及时更换后级的吸收剂。
本文关键字:嵌入式 嵌入式系统-技术,单片机-工控设备 - 嵌入式系统-技术






