本文介绍了一种船载光电稳定跟踪伺服系统,着重介绍了功率驱动器与基于TMS320F28335 DSP的数字伺服控制器的设计与实现,简单介绍了系统软件设计和电磁兼容设计。工程实践结果表明:该系统具有较快的动态响应和较强的抗干扰性,能有效地隔离船体摇摆扰动,对类似的工程设计具有一定的参考意义。
船载光电稳定跟踪伺服系统的主要任务是隔离浪涌引起的船体摇摆,同时完成对目标的精确跟踪。本系统通过光纤速率陀螺反馈构成速率稳定环路,敏感船体角速率变化,反方向补偿该速率的变化,保证光电负载瞄准线稳定;同时接收上位机或者光电传感器发送的位置偏差指令,控制负载框架使光电设备准确跟踪目标,实现稳定跟踪功能。
1 系统组成
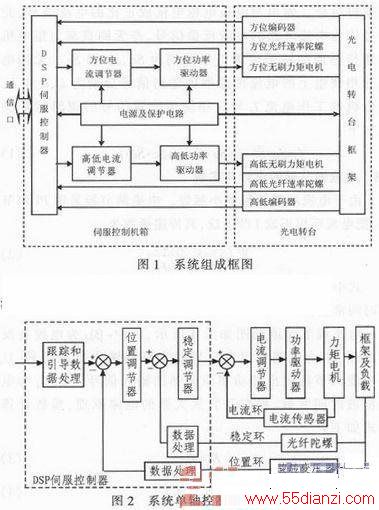
系统由伺服控制机箱和光电转台两大部分组成,其中伺服控制机箱由箱体、电源及保护电路、DSP伺服控制器、电流调节器、功率驱动器组成;光电转台为两轴系,无刷直流力矩电机、测角编码器分别套轴安装在光电转台上,方位轴系、高低轴系分别独立安装一套光纤速率陀螺,感应本轴系的角速率。系统组成框图如图1所示。
2 系统的设计与实现
2.1 系统控制结构
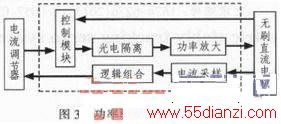
为了实现系统的高精度和高可靠性,系统控制结构采用多环路串级控制方案,其系统单轴(方位轴、高低轴)控制结构图如图2所示,位置调节器和稳定调节器由DSP伺服控制器实现数字调节,采用该设计方案既能充分发挥DSP伺服控制器的高速数据处理能力,又能简化电路,增加系统设计灵活性。
2.2 功率驱动器设计与实现
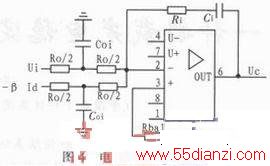
作为无刷直流力矩电机的直接驱动部件,功率驱动器的性能对整个伺服系统的性能具有决定性作用。功率驱动器是将电流调节器的控制误差信号进行功率放大,以驱动电机带动负载转动。本系统功率驱动器主要由基于MC33035的无刷电机控制模块、基于高速光耦HCPLA504的光电隔离电路、基于三菱PM25RAL120的功率放大模块和电流采样电路、逻辑组合电路组成,具有抗干扰性强、可靠性高、稳定性好等优点。功率驱动器工作流程图如图3所示,虚框内为功率驱动器。
控制模块接收外部控制信号(包括无刷电机转子位置传感器信号、控制模块使能信号、刹车控制信号、电机旋转方向信号和误差控制信号等),产生驱动模块需要的6路原始驱动控制信号。6路原始驱动控制信号经过光耦隔离由功率放大模块进行功率放大,驱动无刷直流力矩电机。
无刷直流力矩电机的电流采样由功率驱动器中的霍尔电流传感器完成,逻辑组合电路对三路电流采样信号进行逻辑组合,输出与电机电枢电流成正比的电流信号,此信号作为电流环路的电流反馈信号。令无刷直流力矩电机位置传感器的转子位置信号分别为Sa、Sb和Sc,无刷电机三相绕组上的电流传感器的输出信号分别为ia、ib和IC,则电机的工作电流Id与三相绕组位置信号的逻辑运算关系如下:
![]()
2.3 电流调节器的设计与实现
由于电流环超调量越小越好,电流调节器采用PI调节器,把电流环校正成I型系统,其传递函数为:
![]()
式中Ki为电流调节器的比例系数,τi为电流调节器的超前时间常数。
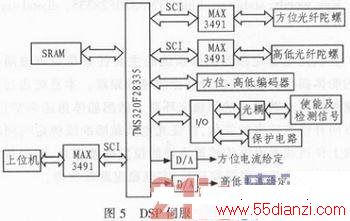
电流调节器原理图如图4所示,其中-BId为电流负反馈电压,Ui为电流给定电压即稳定环路输出电压信号,Uc为电流调节器输出即功率驱动器的输入信号。令Toi为电流滤波时间常数,根据运算放大器的电路原理,参数计算公式如下:

式(3)、(4)、(5)用于计算电流调节器具体参数。
2.4 DSP伺服控制器的设计与实现
2.4.1 DSP伺服控制器的硬件设计
DSP伺服控制器硬件电路主要由主控芯片TMS320F28335、DSP外围电路、D/A转换电路、故障检测电路、MAX3491电平转换电路、安全保护电路等构成,其组成框图如图5所示。系统外扩了512Kx16位SRAM,方便系统调试时的外部仿真;利用DSP芯片自带的3路SCI,经接口芯片MAX 3491电平转换后,将TTL电平信号转换为RS422电平信号,实现DSP伺服控制器与光纤速率陀螺及上位机的通信,所有输入输出的I/O信号均通过光耦与外部隔离,起到保护DSP内核的作用。DSP伺服控制器的方位、高低两路输出信号经过D/A后分别作为电流调节器的电流给定电压信号。
2.4.2 DSP伺服控制器稳定环路控制算法
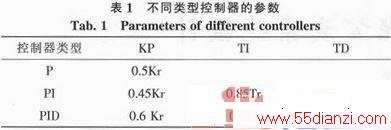
稳定环路为电流环外环,DSP伺服控制器采集光纤速率陀螺速率反馈信号,经过数据处理与数字滤波后作为速率反馈数据与位置环路送出的速率数据给定数据进行PID运算,其结果经过D/A后作为电流环的电流给定电压信号。稳定环路控制算法采用临界比例法,临界比例法是一种经验方法,这种方法首先将控制器选为纯比例控制器,并改成闭环,改变比例系数,使系统对阶跃响应达到临界状态,这时记下比例系数Kr,临界震荡周期为Tr,根据Ziegler-Nivhols提供的经验公式,就可以由这两个基准参数得到不同类型控制器的参数,如表1所示。调试时,先采用临界比例法得到初始参数,然后在此基础上采用凑试法进一步完善。
2.4.3 DSP伺服控制器位置环路控制算法
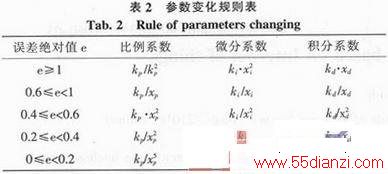
位置环主要实现对目标指令的快速准确跟踪,其控制算法采用变参数PID控制,变参数PID控制是一种通过误差大小改变比例、积分、微分作用强度的控制算法。变参数PID控制参数随误差变化情况的规则如表2所示,其中Kp、Ki、Kd分别为比例、积分、微分系数,它们的值可通过常规PID整定的方法得到。而xp、xi、xd分别为比例、积分、微分的变化量,只要误差区域划分合理,就能很好地减小干扰对转台的影响,加快系统动态响应速度。
3 控制系统软件设计
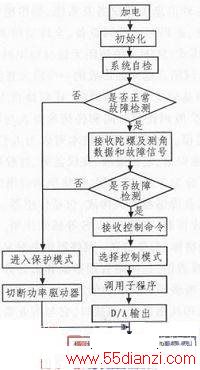
系统软件在CCS3.3开发环境下用C语言编写,采用模块化设计,系统软件由1个主程序3个子程序组成,3个子程序分别对应自动跟踪、引导跟踪、手动跟踪三种工作状态,主程序接收上位机控制命令后对应相应的工作状态调用子程序,系统软件主程序流程如图6所示。
4 系统电磁兼容设计
光电稳定跟踪伺服系统集光学、电子、电气、精密机械为一体,工作时会产生各种感应和干扰,这些干扰有可能影响系统正常工作,因此伺服系统的电磁兼容设计不容忽视。本系统电磁兼容设计主要从以下几个方面考虑:
1)屏蔽,采用带屏蔽层的信号线,伺服控制机箱机械结构采用屏蔽设计。
2)隔离,电路设计中高压与低压隔离,强电与弱电隔离,动力电与信号电隔离,模拟电路和数字电路分开,交流电源与直流电源分开。
上一篇:基于FPGA的高性能加密卡的设计






