2.4 辅助通信、与测控中心交互
系统由三个子系统构成,每个子系统有四路RS422串口,记作Ai、Bi、Ci(i=1、2、3、4)。根据任务的需求,Ai、Bi、Ci连接在一起,分别完成信息采集、子系统之间辅助通信、与测控中心交互的任务。
与测控中心实时交互的目的是:一方面将系统状态和各种参数传送到测控中心;另一方面,测控中心可以发送指令,完成指定的任务。
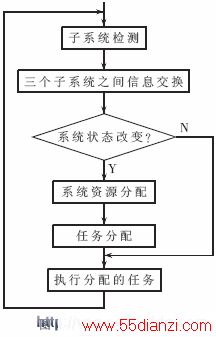
测控中心实时监视系统的工作状态。当CAN总线工作正常时,系统自动完成任务分配等任务;当CAN总线出现断路或其他线路故障时,测控中心发送指令给系统,人工分配任务,保证系统正常工作。
根据任务的需求,三个子系统的串口Ai、Bi、Ci(i=1、2、3、4)连接在一起发送数据时会发生冲突,因此,系统应根据各串口的工作状态确定线路状态,根据线路状态决定对串口的读写。
本文介绍了由三个 DSP 嵌入式子系统构成的基于CAN总线的分布式系统的软、硬件设计方案,着重分析了各子系统之间协同工作的方式。该系统充分利用了分布式系统的并发性和可靠性等特点,在满足多路信号实时处理、多个过程控制、与测控中心实时交互等要求的基础上,采用自动分配任务和指令分配任务相结合的方式,有效地提高了系统的可靠性。实验仿真和现场测试表明,该系统不仅满足了任务要求,而且还具有很高的稳定性和可靠性。
参考文献
1 Simon-Klar C.A Multi DSP board for real time SAR pro-cessing using the HiPAR-DSP 16.In:Proceedings of the In-ternational Geoscience and Remote Sensing Symposium 2002,2002,6
2 Coulouris G,Dollimore J,Kindberg T著,金蓓弘译.分布系统概念与设计.北京:机械工业出版社,2004
3 Bacon J,Harris T著,陈向群译.操作系统-并发与分布式软件设计.北京:电子工业出版社,2005
4 何炎祥.分布式操作系统.北京:高等教育出版社,2005






