
4 结束语
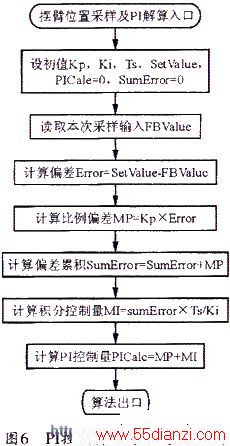
本文分析了 主动放线机 的软硬件实现方法,该方法通过选用动态响应快,易于启停及变速的步进电机作为执行元件,抗干扰性较强的PIC单片机 PIC18F66J10 作为主控芯片和集成PWM驱动芯片SLA7026作为步进电机驱动器来简化硬件电路设计,从而提高了系统工作的稳定性和可靠性。同时使用PI控制算法使放线速度不断跟随绕线速度的变化,近而达到放线速度自动控制目的。实验证明,该系统能达到相关技术指标,可在使用中取得良好的效果。
本文关键字:单片机 PIC单片机,单片机-工控设备 - PIC单片机






