1、 X9241概述
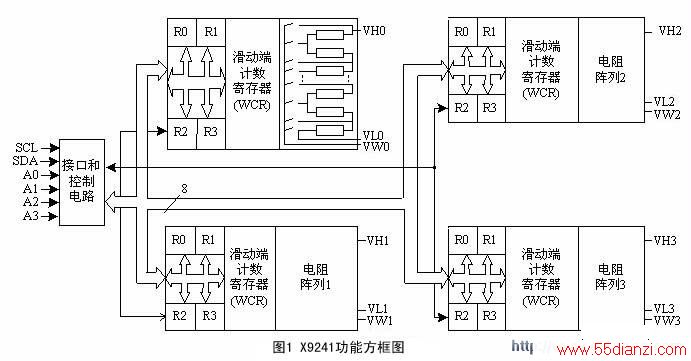
X9241是XICOR公司生产的、把4个E2POT数字电位器集成在单片的CMOS集成电路上的一种数字电位器。它包含4个电阻阵列,每个阵列包含63个电阻单元,在每个单元之间和2个端点之间都有被滑动单元访问的抽头点。滑动单元在阵列中的位置由用户通过2线串行总线接口控制。每个电阻阵列与1个滑动端计数寄存器(WCR)和4个8位数据寄存器联系在一起。这4个数据寄存器可由用户直接写入和读出。WCR的内容控制滑动端在电阻阵列中的位置,其功能框图如图1所示。
2、 X9241工作原理
X9241支持双向总线的定向规约,是一个从属器件。它的高4位地址为0101(器件类型辨识符),低4位地址由A3~A0输入端状态决定。在SDA线上的数据只有在SCL为低期间才能改变状态。当SCL为高时,SDA状态的改变用来表示开始和终止条件(开始条件:SCL为高时,SDA由高至低的跳变;终止条件:SCL为高时,SDA由低至高的跳变)。送给X9241的所有命令都由开始条件引导,在其后输出X9241从器件的地址。X9241把串行数据流与该器件的地址比较,若地址比较成功,则作出一个应答响应。送到X9241的下一个字节包括指令及寄存器指针的信息,高4位为指令,低4位用来指出4个电位器中的1个及4个辅助寄存器中的1个,其格式为:
I3 I2 I1 I0 P1 P0 R1 R0
指 令 电位器选择 寄存器选择
9条指令中的4条以发送指令字节作为结束。这些二字节指令在WCR与数据寄存器中的1个之间交换数据;4条指令为三字节指令,这些指令在主机与X9241之间传输数据(包括主机与1个数据寄存器和主机与WCR之间);还有1条指令为增加/减少指令。三类指令的指令序列及说明见图2及表1。


X9241包括4个WCR,每个E2POT电位器各1个,WCR可以被认为是一个6位并行和串行装载的带有输出译码的计数器,用来选择电阻阵列的64选1的开关。WCR是一个易失性存储器,若断电,其内容即消失。该存储器在上电时自动装入R0的值,但必须注意这个值可能与断电时WCR中的值不同。
每个电位器有4个非易失性数据寄存器。这些寄存器可以被主机直接读出或写入,而且数据可以在4个数据寄存器的任一个和WCR之间传输。任何改变这些寄存器的操作都是非易失性的操作,将花去10 ms的时间(最大)。
X9241的电阻阵列之间可以串联。在三字节指令中,其数据字节包括用来定义滑动端位置的6位(LSB)加上高两位:CM(串联方式,其为0时电位器正常工作;其为1时,电位器与它相邻的高序号的电位器串联连接)和DW(禁止滑动端,其为0时滑动端使能;为1时滑动端被禁止,此时滑动端是电气上隔离的并且是浮空的)。当工作于串联方式时,被串联的阵列的VH、VL及滑动端这三个输出端必须在电气上与外部连接,除了一个滑动端以外,其余的滑动端必须禁止。串联后的电阻阵列如图3所示。
3、 X9241与PIC16CXX 单片机 的接口及程序清单

图4为PIC16C72与X9241的接口电路。与此对应,给出了所有X9241命令操作的程序清单。在此程序中,MAIN为一主程序。在MAIN中,将43写入E2POT#2的WCR(即滑动端位置为#43)。然后将滑动端抽头位置减少15个脉冲的位置,这使得被选定的WCR减少到值28(即滑动端位置为#28)。随后发出的其它命令也都是相同的过程,清单中不再赘述。
4、程序清单:
程序清单( 单片机 为PIC16C72,晶振为4M):
STATUS EQU 03H ;PIC16C72内部特殊
C EQU 0 ;功能寄存器及标志位
PORTC EQU 07H
TRISC EQU 87H
COMMAND EQU 24H
ID EQU 25H ; 0 0 0 0 P1 P0 R1 R0
ADDR_BYTE EQU 26H; 0 1 0 1 A3 A2 A1 A0
DATA_BYTE EQU 27H ;CM DW D5 D4 D3 D2 D1 D0
PULSES EQU 28H ;DIR X D5 D4 D3 D2 D1 D0
CASE EQU 29H
COUNT EQU 2BH
TEMPP EQU 2CH
CLOCK MACRO ;时钟
NOP ;LET SDA SET-UP
BSF PORTC,6 ;SCL=1
NOP
NOP
NOP
BCF STATUS,C ;0送C
BTFSC PORTC,7 ;SDA=0?
BSF STATUS,C ;NO,1送C
BCF PORTC,6 ;SCL=0
ENDM
SEND_BIT MACRO
BCF PORTC, 7 ;0送SDA
BTFSC TEMPP, 7 ;TEMPP.7=0?
BSF PORTC, 7 ;NO,1送C
CLOCK ;时钟
ENDM
START_COND MACRO ;开始条件
BSF PORTC,7 ;SDA=1
BSF PORTC,6 ;SCL=1
NOP
NOP
NOP
NOP
BCF PORTC,7 ;SDA=0
NOP
NOP
NOP
NOP
BCF PORTC,6 ;SCL=0
ENDM
STOP_COND MACRO ;终止条件
BCF PORTC, 7 ;SDA=0
BSF PORTC, 6 ;SCL=1
NOP
NOP
NOP
NOP
BSF PORTC, 7 ;SDA=1
ENDM
ORG 0
GOTO MAIN ;转主程序
INTERPRET:
MOVF COMMAND,W;
ADDWF 2
FIRST:
CALL READ_WCR ;COMMAND ‘0’
RETURN ;读WCR
CALL WRITE_WCR;COMMAND’2’
RETURN ;写WCR
CALL READ_DR ;COMMAND’4’
RETURN ;读寄存器
CALL WRITE_DR ; COMMAND’6’
RETURN ;写寄存器
CALL XFR_DR ;COMMAND’8’
RETURN ;数据寄存器至WCR(单个)
CALL XFR_WCR ; COMMAND’0AH’
RETURN ; WCR至数据寄存器(单个)
CALL GXFR_DR ; COMMAND’0CH’
RETURN ; 数据寄存器至WCR(全部)
CALL GXFR_WCR ; COMMAND’0EH’
RETURN ; WCR至数据寄存器(全部)
CALL INC_WIPER ; COMMAND’10H’
RETURN ;增加/减小指定的WCR
INSTR_GEN:
START_COND ; 开始条件
MOVF ADDR_BYTE, W ;送地址字节
CALL SEND_BYTE
MOVF ID, W ;送命令字
CALL SEND_BYTE
MOVF CASE, W ;根据CASE值散转
ADDWF 2
GOTO CASE0
GOTO CASE1
GOTO CASE2
GOTO CASE3
GOTO CASE4
GOTO CASE5
READ_WCR:
MOVLW 90H ;高四位为命令与ID组
IORWF ID, 1 ;合成新ID,读WCR
CLRF CASE ; CASE=0
CALL INSTR_GEN
RETURN
WRITE_WCR:
MOVLW 0A0H ;写WCR
IORWF ID, 1
MOVLW 1
MOVWF CASE ;CASE=1
CALL INSTR_GEN
RETURN
READ_DR: ;读寄存器
MOVLW 0B0H
IORWF ID, 1
MOVLW 0 ;CASE=0
MOVWF CASE
CALL INSTR_GEN
RETURN
WRITE_DR: ;写寄存器
MOVLW 0C0H
IORWF ID, 1
MOVLW 2
MOVWF CASE
CALL INSTR_GEN
RETURN
XFR_DR: ;传输P1、P0、R1、R0指
MOVLW 0D0H ;定的寄存器中的内容至
IORWF ID, 1 ;与之相关的WCR
MOVLW 3
MOVWF CASE
CALL INSTR_GEN
RETURN
XFR_WCR: ;传输由P1、P0指定的
MOVLW 0E0H ;WCR中的内容至R1、
IORWF ID, 1 ;R0指定的寄存器中
MOVLW 4
MOVWF CASE
CALL INSTR_GEN
RETURN
GXFR_DR: ;传输由R1、R0指定的所
MOVLW 10H ;有的四个数据寄存器的内
IORWF ID, 1 ;容至与它们相应的WCR中
MOVLW 3
MOVWF CASE
CALL INSTR_GEN
RETURN
GXFR_WCR: ;传输所有WCR中的内
MOVLW 80H ;容至与它们相应的由R1,
IORWF ID, 1 ;R0指定的数据寄存器中
MOVLW 4
MOVWF CASE
CALL INSTR_GEN
RETURN
INC_WIPER: ;使能增加/减小由P1和
MOVLW 20H ;P0指定的WCR
IORWF ID, 1
MOVLW 5
MOVWF CASE
CALL INSTR_GEN
RETURN
CASE0:CALL GET_BYTE ; 接收一字节
GOTO CASE3
CASE1:MOVF DATA_BYTE, W
CALL SEND_BYTE ;发送数据字节
GOTO CASE3
CASE2:MOVF DATA_BYTE,W
CALL SEND_BYTE
CASE4:STOP_COND
CALL POLLING ;轮询
CASE3:STOP_COND
RETURN
CASE5:MOVLW B’00111111’;取出脉冲增加或减
ANDWF PULSES, W ;少的个数送COUNT
MOVWF COUNT
MOVLW B’10000000’; 取出脉冲增加或减
ANDWF PULSES,W;少的方向位送TEMPP.7
MOVWF TEMPP
WIPER_LOOP:SET_BIT ;发送TEMPP.7至SDA上并
DECFSZ COUNT;产生COUNT个脉冲于SCL
GOTO WIPER_LOOP
STOP_COND ;停止条件
RETURN
SEN_BYTE: 将TEMPP的内容发送出去
MOVWF TEMPP;
MOVLW 8 ; 共发送八位
MOVWF COUNT
BIT_LOOP:SET_BIT
NEXT_BIT:RLF TEMPP
DECFSZ COUNT
GOTO BIT_LOOP
BSF PORTC, 7 ;八位发送完毕
NOP ;释放SDA
NOP
NOP
CLOCK
RETURN
GET_BYTE: ;接收一字节,SDA=1
BSF PORTC, 7
MOVLW 8






