本文实验中采用国外某知名风电公司风力发电机组作为实验对象,其额定功率550KW,采用液压变桨系统,液压变桨系统原理图如图3所示。从图3中可以看出,通过改变液压比例阀的电压可以改变进桨或退桨速度,在风力机出现故障或紧急停机时,可控制电磁阀J-B闭合、J-A和J-C打开,使储压罐1中的液压油迅速进入变桨缸,推动桨叶达到顺桨位置(90°)。
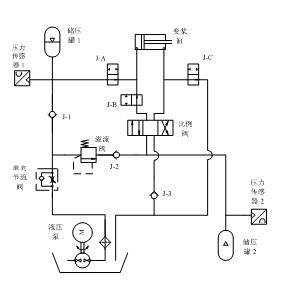
图3 液压变桨距控制系统原理图
本系统中采用OMRON公司的CJ1M系列PLC。发电机的功率信号由高速功率变送器以模拟量的形式(0~10V对应功率0~800KW)输入到PLC,桨距角反馈信号(0~10V对应桨距角0~90°)以模拟量的形式输入到PLC的模拟输入单元;液压传感器1、2也要以模拟量的形式输入。在这里选用了4路模拟量的输入单元CJ1W-AD041;模拟量输出单元选用CJ1W-DA021,输出信号为-10V~+10V,将信号输出到比例阀来控制进桨或退桨速度;为了测量发电机的转速,选用高速计数单元CJW-CT021,发电机的转速是通过检测与发电机相连的光电码盘,每转输出10个脉冲,输入给计数单元CJW-CT021。
3.2系统的软件设计
本系统的主要功能都是由PLC来实现的,当满足风力机起动条件时,PLC发出指令使叶片桨距角从90°匀速减小;当发电机并网后PLC根据反馈的功率进行功率调节,在额定风速之下保持较高的风能吸收系数,在额定风速之上,通过调整桨距角使输出功率保持在额定功率上。在有故障停机或急停信号时,PLC控制电磁阀J-A和J-C打开,J-B关闭,使得叶片迅速变到桨距角为90°的位置。
风力机起动时变桨控制程序流程如图4所示。当风速高于起动风速时PLC通过模拟输出单元向比例阀输出1.8V电压,使叶片以0.9°/s的速度变化到15°。此时,若发电机的转速大于800r/min或者转速持续一分钟大于700r/min,则桨叶继续进桨到3°位置。PLC检测到高速计数单元的转速信号大于1000r/min时发出并网指令。若桨距角在到达3°后2分钟未并网则由模拟输出单元给比例阀输出-4.1V电压,使桨距角退到15°位置。
发电机并上电网后通过调节桨距角来调节发电机输出功率,当实际功率大于额定功率时,PLC的模拟输出单元CJ1W-DA021输出与功率偏差成比例的电压信号,并采用LMT指令使输出电压限制在-4.1V(对应变桨速度4.6°/s)以内。当功率偏差小于零时需要进桨来增大功率,进桨时给比例阀输出的最大电压为1.8V(对应变桨速度0.9°/s)。为了防止频繁的往复变桨,在功率偏差在±10kW时不进行变桨。
在变桨距控制系统中,高风速段的变桨距调节功率是非常重要的部分,若退桨速度过慢则会出现过功率或过电流现象,甚至会烧毁发电机;若桨距调节速度过快,不但会出现过调节现象,使输出功率波动较大,而且会缩短变桨缸和变桨轴承的使用寿命。会影响发电机的输出功率,使发电量降低。在本系统中在过功率退桨和欠功率进桨时采用不同的变桨速度。退桨速度较进桨速度大,这样可以防止在大的阵风时出现发电机功率过高现象。
图6为变桨距功率调节部分的梯形图程序。100.08是启动功率调节命令,当满足功率调节条件时,继电器100.08由0变为1;D2100存放的是发动机额度功率与实际功率的偏差,当偏差ΔP满足-10kW《ΔP《10kW时将0赋给D2100;60.07为1时即功率偏差为负值,D2100中的功率偏差按一定比例进行缩放,并通过LMT指令限位输出到比例阀,输出的最小值对应-4.1V电压;若继电器60.07为0,即功率偏差为正值,将D2100的值通过SCL3指令按比例系数缩放,并通过LMT指令输出到比例阀,输出的电压最大值为1.8V。






