关键词:EAST;虚拟仪器;阻抗匹配;可编程逻辑控制器
引言
EAST(实验型先进超导托卡马克)作为我国自行设计、研制的第一个全超导托卡马克核聚变实验研究装置,即将在我所建成并试运行。较之原HT-7装置,该装置在许多方面都有重大改进,其中用于射频波加热等离子体的天线阻抗匹配系统将由原液态调配系统改进为真空调谐电容调匹配。在等离子体放电过程中,实验人员不能靠近聚变装置,而调谐电容距离控制室为100余米,因此,对天线阻抗的匹配调节必须实现远程控制。
1 远程控制系统框图
控制系统上位机采用工控机,下位机采用西门子S7-224PLC,在计算机串口与PLC的通信口之间实现监控信号的远距离传输。由于计算机为RS-232串行口,但RS-232标准达不到所要求的通信距离,另一方面PLC所带的串行通信口为RS-485接口,该接口完全满足100米的通信距离。所以只须在上位机的串行口安装RS232/485物理协议转换器即可,此处采用JARA2102转换器。执行机构为驱动器控制的安川高精度伺服电动机,型号为SGMAH-08ADA,由其带动调谐电容的外部螺杆旋转实现电容的改变,二者之间通过联轴器连接,同时驱动器工作在位置控制模式下。整个控制系统硬件连接框图如图1所示。

图1 远程控制系统框图
2 上下位机间的通信协议
西门子S7-224PLC的RS-485通信口可工作于自由口通信模式下,即由用户自定义通信协议。为此,我们约定上下位机间的通信由上位机发起,并且上位机每发送一个命令帧都要求下位机反馈一帧数据,这样上位机可以监控命令的执行情况,并对反馈的数据进行处理。
上位机命令帧的格式如下表所示,其中左边的33个字节为上位机命令帧格式,右边的13个字节为下位机反馈帧格式。

其中,起始字符约定为字母“g”,下位机当检测到该字符时,认为是一帧数据的开始,结束字符规定为字母“G”,下位机用该字符判断一帧数据的结束。功能字符用05H表示写下位机的某个寄存器。在西门子S7-224PLC中可以用8位16进制数表示一个寄存器的地址即:
0000(H) :I寄存器; 0100(H) :Q寄存器
0200(H) :M寄存器;0800(H) :V寄存器
例如:0000000(H)表示IB000;08000064表示VB100。
在数据传输过程中,指令可能受到干扰而发生错误,为了侦测指令在传输过程中的错误,接收方必须对接收到的指令作进一步的确认工作,以防止错误的指令被执行,方法之一便是使用校验码,本文中规定为Byte1~29字符串的ASCII码以字节为单位作异或和。
根据上述指令格式,若上位机向下位机的VB000中写入2000个脉冲,应发送的命令帧为“g602080000C808000007D0000000003CG”,其中“3C”为校验码。
3 上位机程序设计与实现
3.1上位机程序流程设计
程序运行以后,首先进入While循环,在此循环内程序按照图2所示的流程图循环执行。首先根据设定的串口通信参数打开串口,此处须注意串口参数的设置必须与下位机一致,方能保证上下位机通信的正常进行。文中波特率设置为9.6kbps、1位起始位、1位停止位、8位数据位、无奇偶校验。然后程序进入转动命令的判断,用三个箝套的CASE语句分别判断电机正、反、停转。如果正转或者反转按钮被按下,则先发送电机转动角度所需要的脉冲数,然后延时等待回读PLC的反馈帧,根据该反馈帧用CASE语句判断脉冲数据帧是否被正确发送,如果发送错误则指示灯以红颜色显示,提示重新发送;如果脉冲数据帧已经正确发送,则发送送转动命令帧,然后延时等待回读PLC的反馈帧,如果发送错误也使指示灯以红颜色显示,提示重新发送;如果按下停转按钮,则直接发送表示停止转动的命令帧。最后程序更新电容值并关闭串口。

图2 上位机程序流程设计
3.2 子VI程序的编制
为方便实现主程序的功能,分别编制了几个子程序即:转速命令帧打包.VI、脉冲数据帧打包.VI、转动命令打包.VI,这几个子程序的编制类似,下面只列出脉冲数据帧打包.VI(未包含起始字符),当需要向下位机VD200中写入脉冲数据时,其程序前后面板如图3所示:

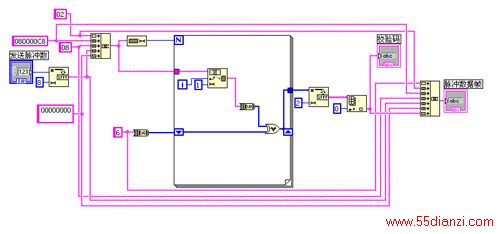
图3脉冲数据帧前后面板
3.3 LabVIEW实现上位机控制界面
3.3.1 LabVIEW串口通信模块
虚拟仪器Labview平台中包含串行通信控制模块。在Labview平台控制的串行通信过程中,数据是以字符串的格式组成的,字符串中的每个字符实际上对应于我们所熟悉的ASCII字符,数据必须转换为ASCII字符串才能进行发送和接收。Labview平台的串行通信模块中提供了VISA Open.vi、VISA Configure Serial Port.vi、VISA Read.vi、VISA Write.vi(、VISA Bytes at seril port.vi、VISA Close.vi”等函数。
实际使用串口读/写函数时,为了确保读写数据的正确,一般在连续的两次读/写串口时,应该有一段延时,此时间的长短与所发送的数据量有关,本文中的延时设置为80ms。
3.3.2 控制界面设计
在上位控制界面中根据实际的要求,需要能够在上位机控制界面分别实现电容值的显示、电机正/反转速度的设置、转动命令的发送、各种错误信息的提示等,用LabVIEW实现的上位机控制界面如图4所示。

图4 控制系统操作界面
4 系统测试结果
作为位置伺服控制系统,系统的优劣可以从三个方面来考察即:较高的定位精度、无超调的定位过程、较快的动态响应。对于本系统而言,在多次的测试过程中未见有超调的定位过程,因而主要检验控制精度和系统响应时间。经多次运行测试,系统在这两方面的特性如下:本文中设置电机转动的最小角度为0.72度,而电机每转动一圈电容值改变3.2pf,因此电容值的控制精度可以达到0.0064pf,完全满足要求。在上位机读写串口过程中需多次读写串口以发送转速、脉冲数、转动命令等,每次读写串口时为保证通信的正常进行都有80ms的延时,同时还要考虑到PLC CPU自检、执行程序的延时,因此执行一次电机转动操作大约需要300ms,整个系统应用EAST ICRH真空调谐电容远程控制取得了较好的效果。
本文作者创新点:本文首次展示了应用LabVIEW实现西门子系列PLC自由口通信协议的方法,详细阐述了协议实现的细节,对串口通信应用程序的开发也具有一定的借鉴意义。
参考文献:
[1] 雷振山《LabVIEW 7 Express实用技术教程》,中国铁道出版社,2005
[2] 邓焱 、王磊《LabVIEW 7.1测试技术与仪器应用》,机械工业出版社,2004
[3] 西门子(中国)有限公司自动化与驱动集团,《 S7-200系统手册》,2005
[4] 金元郁、庞中华 基于VC++与AI调节器串口通信的实时监控系统 微计算机信息,2005年第4期
[5] 李光明 李妍 李茜 用VB实现S7-300PLC与PC机的普通串口通信 微计算机信息,2005年07S期
本文关键字:远程控制 电工文摘,电工技术 - 电工文摘






