1.H 型桥式驱动电路
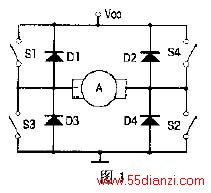
直流电机驱动电路使用最广泛的就 是H型全桥式电路,这种驱动电路可以 很方便实现直流电机的四象限运行,分 别对应正转、正转制动、反转、反转制动。 它的基本原理图如图1所示。
全桥式驱动电路的4只开关管都工 作在斩波状态,S1、S2为一组,S3、S4 为另一组,两组的状态互补,一组导通则 另一组必须关断。当S1、S2导通时,S3、 S4关断,电机两端加正向电压,可以实 现电机的正转或反转制动;当S3、S4导 通时,S1、S2关断,电机两端为反向电 压,电机反转或正转制动。
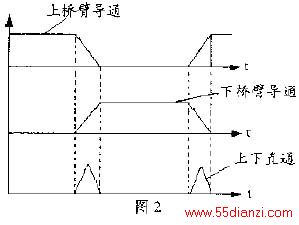
在小车动作的过程中,我们要不断 地使电机在四个象限之间切换,即在正 转和反转之间切换,也就是在S1、S2导 通且S3、S4关断,到S1、S2关断且S3、 S4导通,这两种状态之间转换。在这种 情况下,理论上要求两组控制信号完全 互补,但是,由于实际的开关器件都存在 开通和关断时间,绝对的互补控制逻辑 必然导致上下桥臂直通短路,比如在上 桥臂关断的过程中,下桥臂导通了。这个过程可用图2说明。
一个电动小车整体的运行性能,首 先取决于它的电池系统和电机驱动系统。 电动小车的驱动系统一般由控制器、功率变换器及电动机三个主要部分组成。 电动小车的驱动不但要求电机驱动系统 具有高转矩重量比、宽调速范围、高可靠 性,而且电机的转矩-转速特性受电源功 率的影响,这就要求驱动具有尽可能宽 的高效率区。我们所使用的电机一般为 直流电机,主要用到永磁直流电机、伺服 电机及步进电机三种。直流电机的控制 很简单,性能出众,直流电源也容易实 现。本文即主要介绍这种直流电机的驱 动及控制。
1.H 型桥式驱动电路
直流电机驱动电路使用最广泛的就 是H型全桥式电路,这种驱动电路可以 很方便实现直流电机的四象限运行,分 别对应正转、正转制动、反转、反转制动。 它的基本原理图如图1所示。
全桥式驱动电路的4只开关管都工 作在斩波状态,S1、S2为一组,S3、S4 为另一组,两组的状态互补,一组导通则 另一组必须关断。当S1、S2导通时,S3、 S4关断,电机两端加正向电压,可以实 现电机的正转或反转制动;当S3、S4导 通时,S1、S2关断,电机两端为反向电 压,电机反转或正转制动。
在小车动作的过程中,我们要不断 地使电机在四个象限之间切换,即在正 转和反转之间切换,也就是在S1、S2导 通且S3、S4关断,到S1、S2关断且S3、 S4导通,这两种状态之间转换。在这种 情况下,理论上要求两组控制信号完全 互补,但是,由于实际的开关器件都存在 开通和关断时间,绝对的互补控制逻辑 必然导致上下桥臂直通短路,比如在上 桥臂关断的过程中,下桥臂导通了。这个过程可用图2说明。
因此,为了避免直通 短路且保证各个开关管动作之间的协同 性和同步性,两组控制信号在理论上要 求互为倒相的逻辑关系,而实际上却必须相差一个足够的死区时间,这个矫正过程既可以通过硬件实现,即在上下桥 臂的两组控制信号之间增加延时,也可 以通过软件实现(具体方法参看后文)。
驱动电流不仅可以通过主开关管流通,而且还可以通过续流二极管流通。当电机处于制动状态时,电机便工作在发电状态,转子电流必须通过续流二极管流通,否则电机就会发热,严重时烧毁。
开关管的选择对驱动电路的影响很大,开关管的选择宜遵循以下原则:
(1)由于驱动电路是功率输出,要求开关管输出功率较大;
(2)开关管的开通 和关断时间应尽可能小;
(3)小车使用的电源电压不高,因此开关管的饱和压降应该尽量低。
在实际制作中,我们选用大功率达林顿管TIP122或场效应管IRF530,效果都还不错,为了使电路简化,建议使用集成有桥式电路的电机专用驱动芯片,如L298、LMD18200,性能比较稳定可靠。
由于电机在正常工作时对电源的干扰很大,如果只用一组电源时会影响单片机的正常工作,所以我们选用双电源供电。一组5V给单片机和控制电路供电, 另外一组9V给电机供电。在控制部分和电机驱动部分之间用光耦隔开,以免影响控制部分电源的品质,并在达林顿管的基极加三极管驱动,可以给达林顿管提供足够大的基极电流。图3所示为采用TIP122的驱动电机电路,IOB8口为“0”,IOB9口输入PWM波时,电机正转,通过 改变PWM的占空比可以调节电机的速度。而当IOB9口为“0”,IOB8口输入PWM 波时,电机反转,同样通过改变PWM的占空比来调节电机的速度。
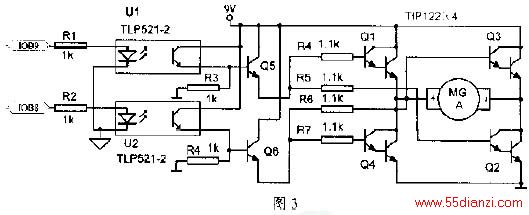
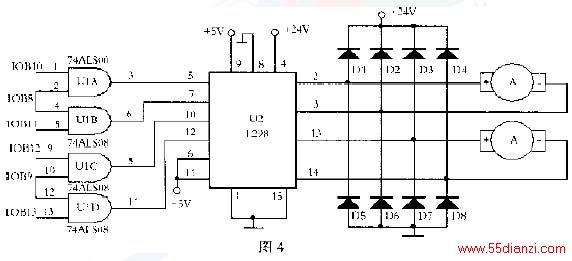
图4为采用内部集成有两个桥式电 路的专用芯片L298所组成的电机驱动电路。驱动芯片L298是驱动二相和四相步进电机的专用芯片,我们利用它内部的 桥式电路来驱动直流电机,这种方法有一系列的优点。每一组PWM波用来控制一个电机的速度,而另外两个I/O口可以控制电机的正反转,控制比较简单,电路也很简单,一个芯片内包含有8个功率管,这样简化了电路的复杂性,如图所示IOB10、IOB11控制第一个电机的方向,IOB8输入的PWM控制第一个电机的速度;IOB12、IOB13控制第二个电机的方向,IOB9输入的PWM控制第二个电机的速度。
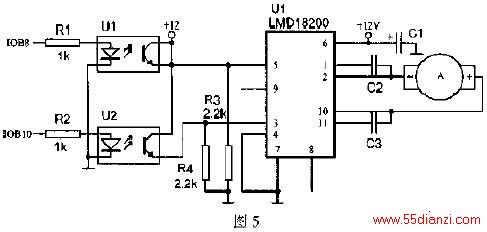
LMD18200是美国国家半导体公司推出的专用于直流电动机驱动的H桥组件,同一芯片上集成有CMOS控制电路和DMOS功率器件。此种芯片瞬间驱动电流可达6A,正常工作电流可达3A,具有很强的驱动能力,无“shot-through”电流,而且此种芯片内部还具有过流保护的测量电路,只需要在LMD18200的8脚输出端测出电压和给定的电压比较即可保护电路过流,从而实现电路的过流保护功能。由LMD18200组成的电机驱动电路如图5所示。LMD18200的5脚为PWM 波输入端,通过改变PWM的占空比就可调节电机的速度,改变3脚的高低电平即可控制电机的正反转。此电路和以上几种驱动电路比较具有明显的优点,驱动功率大,稳定性好,实现方便,安全可靠。
2 .P W M 控制
PWM(脉冲宽度调制)控制,通常 配合桥式驱动电路实现直流电机调速, 非常简单,且调速范围大,它的原理就 是直流斩波原理。如图1所示,若S3、S4 关断,S1、S2受PWM控制,假设高电平 导通,忽略开关管损耗,则在一个周期 内的导通时间为t,周期为T,波形如图 6,则电机两端的平均电压为: U=Vcc t/ T=αVcc ,其中,α=t/T称为占空比,Vcc为电源电压(电源电压减去两个开关 管的饱和压降)。

电机的转速与电机两端的电压成比例,而电机两端的电压与控制波形的占空比成正比,因此电机的速度与占空比成比例,占空比越大,电机转得越快,当占空比α=1时,电机转速最大。
PWM控制波形的实现可以通过模拟 电路或数字电路实现,例如用555搭成的触发电路,但是,这种电路的占空比不能自动调节,不能用于自动控制小车的调 速。而目前使用的大多数单片机都可以直接输出这种PWM波形,或通过时序模拟输出,最适合小车的调速。我们使用的是凌阳公司的SPCE061单片机,它是16位单片机,频率最高达到49MHz,可提供2路PWM 直接输出,频率可调,占空比16级可调,控制电机的调速范围大,使用方便。SPCE061单片机有32个I/O口, 内部设有2个独立的计数器,完全可以模拟任意频率、占空比随意调节的PWM信号输出,用以控制电机调速。
本文关键字:电机 电工文摘,电工技术 - 电工文摘






