


基于上述方法的单相电路谐波电流检测原理如图4所示。其中,e-st是使信号滞后T/4的环节,C22、C-122含义见式(8)。
4 单相APF的波形控制方法
目前常用的脉宽调制(PWM)技术有:①基于正弦波对三角波调制的PWM技术;②基于消除指定谐波的HEPWM技术;③基于电流滞环跟踪控制的PWM技术(也称自适应PWM技术)。
第一种方法适用于模拟系统,微机控制系统中很少采用;第二种方法需要预先计算要消除的若干次指定的谐波,在负载经常变化的情况下,跟随特性难以保证;第三种方法比较适合于微机控制,其原理为实时检测逆变器的输出,并与跟踪目标进行比较,当偏差超出允许的边带时控制器动作,使偏差减小。由此可见,该方法使逆变器输出和理想波形之间总存在一个时滞,且减少偏差的边带就必须提高逆变器工作的频率。本文首次将空间矢量方法(SVPWM)应用于APF的波形控制,在每个控制周期均使逆变器输出2个“精确”的矢量,有效地提高了逆变器的开关效率,并使控制精度大大提高。
单相逆变器的等值电路如图5所示。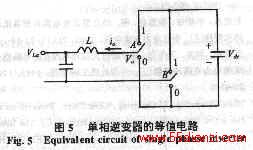
图5中开关A、B共有4种状态组合,可表示为矢量V0至V3,其中V1=Vdc、V2=-Vdc,V0、V3为零矢量,零矢量发生作用时,逆变器的直流电压不输出任何能量,但使输出电流构成回路并调节矢量V1和V2的作用时间,因而在控制中是不可缺少的。当逆变器需输出电压Va时,可表示如下
TSVa=T1Vy+T0Vx (9)
式中 Vy代表矢量V1或V2;Vx代表零矢量V0或V3;T1为矢量Vy的作用时间;T0为Vx的作用时间;Ts为控制周期,且必须:
T0=Ts-T1 (10)
当T0≥0时,式(9)完全成立,逆变器在1个控制周期Ts内开关A、B均动作一次,可输出“精确的”矢量Va。
当T0<0时,式(9)不能成立,逆变器的输出不能跟踪Va的变化,因此式(10)中T0≥0表示了单相逆变器是否完全可控的条件。
在自适应控制PWM技术中,代替式(9)的逆变器输出矢量为TS Vy和Ts Vx两者之一,零矢量的作用时间要么为0,要么为Ts,因此逆变器的输出只能使偏差减少,不能做到精确控制。
5 SAPF的单相滤波系统实验结果
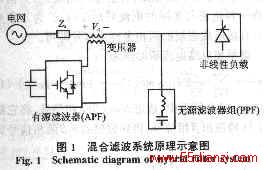
为分析SAPF对PPF的滤波特性的影响,设计并制作了含SAPF的混合补偿系统实验装置。SAPF系统原理结构如图1所示,该系统的一次电路主要由3部分组成:单相整流器负载、PPF和逆变器。逆变器的开关器件采用德国SEMIKON的IGBT模块;该系统的控制系统由高性能的数字信号处理器TMS320C50及高速外围芯片组成,完成谐波电流的分解,控制矢量和相应矢量作用时间的计算;PWM的驱动由SEMIKON配套的驱动电路完成,该电路同时具备桥臂短路等故障的保护功能。
5.1 无源滤波器组
在混合补偿系统中,PPF提供谐波电流的通路。实验中采用的PPF参数如表1所示。由于实验条件所限,高通滤波器没有制作,仅制作了3次和5次单调谐滤波器,其参数如表1所示。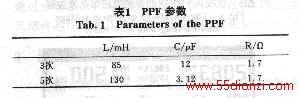
5.2 实验结果
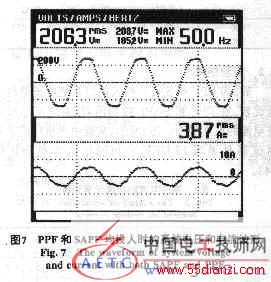
表2为PPF和SAPF投入前后系统电流谐波含量比较。在PPF和SAPF投切前后,系统电压和系统电流的波形如图6、图7所示。实验中测量和记录所用仪器是美国FLUKE公司的电力质量分析仪F43。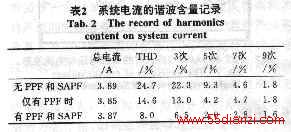
从表2可见,由于有3次单调谐滤波器和5次单调谐滤波器分别提供3次和5次谐波通道,当SAPF发生作用时,使3次谐波电流和5次谐波电流更多地流过PPF,使系统电流谐波含量明显减少。对7次和9次谐波电流,由于没有相应的谐波通道,SAPF作用前后谐波含量没有明显变化。系统谐波电流的总畸变率变化明显,SAPF投入前后总畸变电流从14.6%下降到8.0%,这些结论验证了理论分析的结果。上述结果是电源电压谐波含有率达5.8%时得到的,对系统电源电压的谐波含量不同时和在无源滤波器失谐的情况下也分别进行了实验研究,同样验证了SAPF对PPF特性的改善作用,并使系统谐波电流的总畸变率大大降低。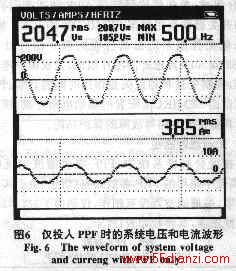
6 结论
理论分析和实验研究结果表明,基于空间矢量方法的SVPWM技术,使单相系统的波形控制比自适应PWM技术具有更高的控制精度。小容量的实验结果表明:SAPF的作用与并联的PPF有关,在存在相应谐波通道的情况下,SAPF可大大改善PPF的滤波效果。对电力机车等大容量的单相负载,SAPF是一种有效的谐波治理装置。
本文关键字:暂无联系方式电工文摘,电工技术 - 电工文摘






