
3.2 上位机软件设计
上位机软件用VB 进行开发。采用Microsoft 公司提供的MicrosoftCommunications Control 串行通信编程的ActiveX 控件,封装了完整的所需的API 函数,为应用程序提供了通过串行口收发数据的简便方法。只要设置Settings 属性包括返回波特率、奇偶校验、数据位、停止位、对应串口等参数。然后设计对应的事件处理,以达到目标通信控制效果。程序主要开发对下位机发送的七条指令及Text 电机状态显示,实现上位机控制。
4 系统仿真运行效果及仿真分析
对应的单拍正转、双拍正转、单双拍正转种情况下由虚拟示波器(OSCILLOSCOPE)采集的脉冲驱动信号,如图3 所示。结合表1 的P1 口脉冲,剔除正常存在的毛刺与抖动,与实际驱动所需的对应脉冲信号是完全吻合的。
下位机在接收到单拍正转对应图3(a)指令后步进电机的相应运动过程,如图4 所示。此处,虚拟步进电机的虚拟步距角为90 度,图中A、B、C、D 四相红代表高电平,蓝代表低电平。图3 与图4 仿真过程记录的信息,与实际设计程序控制预期运行结果完全吻合,仿真效果明显可信。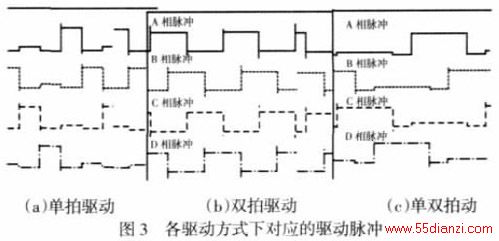

如图5 所示,下位机在运行的条件下,上位机Option 单拍,单击正转按钮,即上位机向下位机发送指令“1”。其中的virtualTerminal(虚拟终端),是Proteus 软件的辅助分析工具,每次串口通信的指令将会被记录下来。步进电机会根据P1 的脉冲形式做对应的运动,Proteus 中LCD、上位机Text 正确显示步进电机运动状态。
5 结束语
提出了一种基于Proteus 的PC 机对步进电机运动控制仿真方法。所构建的仿真系统能很好的实现PC 机对步进电机的同步控制与状态显示整体过程,通过程序设计开发与仿真系统无缝连接,实现了程序所预期要求的控制过程,并给出了丰富的实验观察接口,仿真实现了程序硬件调试、系统调试过程。
参考文献
1 孙耀杰,左贺,康龙云,曹秉刚,史维祥. 抑制混合式步进电机转矩波动的时变重复控制[J]. 中国电机工程学报,2004,24(11):183~187
2 孟武胜,李亮. 基于AT89C52 单片机的步进电机控制系统设计[J]. 测控技术,2006,25(12):46~51
3 张俊杰,李世其,熊友军. 基于数据手套的机械手控制技术应用[J]. 计算机应用研究,2006(6):170~175
4 李河清,侯志祥. 基于串行通信的步进电机小型集散控制系统[J].计算机工程,2007,33(10):258~260
5 金建新,郑虎子. 16 位单片机控制混合式步进电机的研究[J]. 机械设计与制造,2007(9):94~96
6 李全利,迟荣强. 单片机原理及接口技术[M]. 北京:高等教育出版社,2004(1)
本文关键字:步进电机 电工文摘,电工技术 - 电工文摘
上一篇:传感器网络混合广播调度方法探讨






