0 引言
根据塔式起重机 处于不同的状态所产生的信息不同的特点,把塔式起重机偏离正常运行的运行状态称为故障状态。由故障诊断原理可知,故障诊断的过程就是将故障征兆集非线性映射到故障集的过程,被诊断设备的某一种故障类型往往引起多个故障征兆;某一故障征兆又可以由多种故障类型引发。因此,从本质上讲,故障诊断过程就是分类识别的过程 。该过程难以用明确的数学模型来描述,利用神经网络的方法使得这种分类识别成为可能。
神经网络作为一种新的方法体系,具有分布并行处理、非线性映射、自适应学习和鲁棒容错等特性,这使得它在模式识别、控制优化、智能信息处理以及故障诊断等方面都有广泛的应用。现今常用的神经网络模型主要有自适应共振理论模型(ART)、误差反向传播模型(BP)、自组织映射模型(SOM)、径向基函数网络模型(RBF)等 ,目前应用最广泛的当属 BP网络模型和 RBF网络模型。
本文通过对RBF神经网络模型的构成和特性进行分析,将塔式起重机身上关键位置的传感器测量所得的形变量作为特征参数,运用 RBF神经网络对塔式起重机的典型7种故障进行诊断分析。实验结果表明,采用RBF神经网络对于诊断多征兆机械系统的故障是有效、可行的。
1 RBF神经网络模型
BP网络是典型的全局逼近网络,即对每一个输入输出数据时,网络的所有参数均要调整。由于BP神经网络是基于梯度下降的误差反向传播算法进行学习的,所以其网络训练速度通常很慢,而且容易陷入局部极小点,尽管采用一些改进快速算法可以较好地解决某些实际问题,但是在设计过程中往往要经过反复的试凑和训练过程,无法严格保证每次训练时BP算法的收敛性和全局最优性。此外,BP网络隐层神经元的作用机理及个数选择也是BP网络中难以确定的问题。而径向基函数网络模型(RBF)是以函数逼近理论为基础而构造的一类前向网络,这类网络学习等价于在多维空间中寻找训练数据的最佳拟合面,网络的每个隐层神经元传递函数都构成了拟合平面的一个基函数。RBF网络是一种局部逼近网络,对输入空间的某一局部区域只有少数的神经元用于决定网络的输出。由于二者的构造本质不同,RBF网络与BP网络相比规模通常较大一些,但学习速度较快,并且网络的函数逼近能力、模式识别与分类能力都优于前者。
1.1RBF神经元模型
一个具有 维输入的径向基函数神经元模型如图1所示。图中 的模块表示求取输入矢量和权值矢量的距离。此模型中采用高斯函数radbas作为径向基神经元的传递函数,其输入 为输入矢量 和权值矢量w的距离乘以阈值,高斯函数radbas是典型的径向基函数,其表达式为 其函数曲线如图2所示。
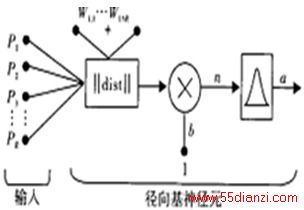
图1 具有R维输入的径向基函数神经元
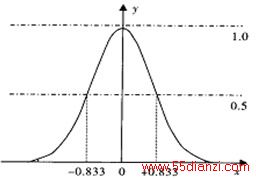
图2 高斯径向基函数曲线
中心与宽度是径向基函数神经元的两个重要参数。神经元的权值矢量w确定了径向基函数的中心,当输入矢量 与w重合时,径向基函数神经元的输出达到最大值,当输入矢量 距离w越远时,神经元的输出就越小。神经元的阈值 确定了径向基函数的宽度,当 越大,则输入矢量 在远离w时函数的衰减幅度就越大。
1.2 RBF神经网络结构
一个典型的径向基函数网络包括2层,即隐层和输出层,如图3所示。网络的输入维数为 ,隐层神经元个数为 、输出个数为 ,隐层神经元采用高斯函数作为传递函数,输出层的传递函数为线性函数。图中 表示隐层输出矢量 的第 个元素, 表示第 个隐层神经元的权值矢量,即隐层神经元矩阵w的第i行。
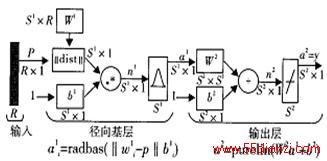
图3 径向基函数网络结构图
2 塔式起重机常见故障诊断实例
经过大量的实地考察了解和分析,塔式起重机的主要典型故障有 :(1)起重量过大(A);(2)塔机 刚度不够(B);(3)起重力矩大(C);(4)起升高度大(D);(5)起重幅度不合适(E);(6)风速大(F);(7) 支撑点松动(G)。通过对塔式起重机的故障进行实地测试,通过安装在塔身上关键位置的传感器测量该处的形变量,经数据采集系统和数据处理系统对塔式起重机的状态进行监测,共选取9个测试点作为检测对象。对各个故障状态分别进行数据采集,形成标准样本数据和待检数据。
采集后的样本数据经过归一化处理,用迭代方法设计RBF网络对 70个(每种10个)训练样本进行训练,使网络训练更有效。该方法每迭代1次就增加1个神经元,直到平方和误差下降到目标误差以下时迭代停止。网络设置中,目标误差为0.01,扩展常数为0.5。其网络训练过程如图4所示。
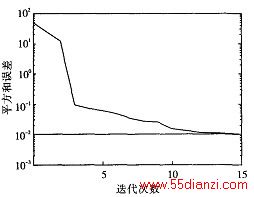
图4 RBF神经网络训练过程
训练过程显示,RBF算法迭代了15次即达到了目标误差的要求,这比BP算法动则百次千次的迭代要快得多。
3实验结果
为了验证训练后的RBF神经网络对塔机故障的诊断性能,本文利用MATLAB进行实验仿真 ,检测结果如下所示,表1为待测的3组样本,送入训练好的RBF网络,检测结果如表2所示。
表1 待测试样本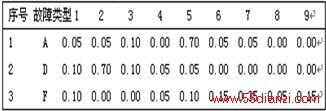
表2 网络诊断输出结果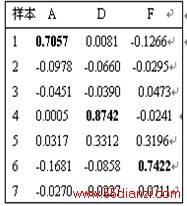
由表2中粗体数字可以看出,RBF网络能有效地对3种情况进行诊断。结果表明RBF网络有唯一确定的解,不存在 BP网络中所遇到的局部极小值问题,而且与BP网络收敛速度慢的缺陷相反,RBF网络学习速度快,适于在线实时监测与诊断。
4结论
本文研究了基于 RBF神经网络的塔式起重机的故障诊断方法。在总结塔机故障规律的基础上,采用 MATLAB的神经网络工具箱函数来对网络进行训练和仿真,以实现塔机的故障诊断,并通过检测样本的仿真实例表明该方法是有效可行的。
本文关键字:起重机 电工文摘,电工技术 - 电工文摘






