��վ����������ŵ��ٵĿ��Ƽ���
1����
Ϊ���ٺ����ֺ����ҹ��ڴ������������������Ź�վ��һ������Ź�վ���Ϊ�̶���̡��ں����ڼ䣬�⽭ˮλ����������ʱ����վ����ͣ����ʹ�ں���ˮ���ܼ�ʱ�ų��������Һ�����Ʋ�����������ʧ�������ʱ��ʹ�����ͬ������������5������ˮ����̿����10�����ң�����ںܴ�̶��Ͻ��ˮ�����⽭ˮλ���߶�����ͣ�������⣬�����ں�������ʧ�����ʵ�ִ������ij�ͬ�����о��кܴ�������Ч�档
���ڱ��õ綯�����Ӳ���ѹΪ��ѹ���ڶ��Ӳ���ñ�Ƶ����ʱ�������豸�۸��������ܹ����ѹ���ơ������˫�����٣�����û�Ҫ����ٷ�Χ���ޣ���Ϊ��10��������Ƶ�豸�������ڶ��Ӳ����ҪС�ö࣬�����Ϻ��㡣����˫�����ٵ���һ����Ҫ�ŵ��ǣ����ӵ������յ������ʿ�ͨ���������ŵ����Ĵ�С����λ���е�����������Ĺ��������ɵ������ɽ������С����ڸ����վ�������������Բ��ô˼����ԺԽ�Լ���ܼ����Ƶ��ص�����������������Ҫ���á�
��������˫�����ٵ��ת�ӱ�Ƶ���ȿ�ѡ�ý�ֱ����Ƶ����Ҳ��ѡ�ý�����AC/AC����Ƶ�������ڽ�����Ƶ����Ƶ����ʱ�������ڽ�ֱ����Ƶ������˱�վ���˫�����ٲ��ý�����Ƶ��ʮ�ֺ��ʵ�[1][2][3]�����Ľ��ܲ���������ʽ������Ƶ����16λ��Ƭ��Ϊ���ƺ��IJ������ֳ��ɱ��оƬ��Ϊ�洢��������·ʵ�ֵĵ���ϵͳ��Ʒ�����������������Ĺ�������Ϊ��������ת�ٽ��з�������ʱת�ӵ�����ֵ����λ�ȸ���ֵ�ļ��㷽����������ϵͳ����Ӳ����ơ�
2ϵͳ�ṹ
˫������ϵͳ�����Ƶ��M�����ű�ѹ��T��������Ƶ�������Ƶ�·�ȹ��ɡ�ϵͳ�ṹ��ͼ1��ʾ��
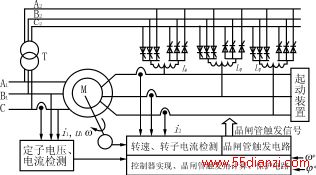
ͼ1��վ˫������������ŵ���ϵͳ��ͼ

ͼ2���ʸ����ϵ

ͼ3���ൽ����ʸ���任ʾ��ͼ
������Ƶ����·�ڿ��Ƶ�·������ʵ������ת�ӹ��磨��ͬ�����У���ת����������������(��ͬ������)��Ϊʹת�ӵ�����Ϊƽ����������˲ʱ��·����������·�м�����ƽ��翹��LP��
���Ƶ�·��Ҫ��ɶ��ӹ���������ת�ӵ�����ת�ٵȼ�⣬�����ݸ���ת�١�������������Ӧʵ��ֵ�IJ�𣬸��ݷ������ƵĻ���˼�룬����һ���Ŀ����㷨������ת�ӹ���Ƶ�ʡ�������ֵ����λ������ֵ������ȷ������բ�ܵĴ�������ʵ�ֶԾ�բ�ܵĿ��ơ�ʵ��ϵͳ�ڸ���ת�٣��أ����������������ǣ��գ����������ȶ����С�
���ڼȶ���ʽ������·������������ݵ���������������ʡ������ѹ��ת�Ӹ�Ӧ���ƣ������ٷ�ΧҪ�����ȷ����
3���Ʒ���
��ǰ�������ı�ת����ͨ������ת�ӵĹ��������ʵ�ֵģ���ͨ������ת�ӵĹ���Ƶ�ʡ�ת�ӵ����ķ�ֵ����λ�����١�
3��1ת�ӹ���Ƶ��
���1Ϊͬ��ת�ٶ�Ӧ�ĵ�Դ��Ƶ�ʣ���Ϊ���ʵ��ת�ٶ�Ӧ�ĵ��Ƶ�ʣ���SΪת�ӹ����Ƶ�ʡ�����̬ʱ�У�
��S=��1����
��ʵ��ת�ٺ�����ת�ٲ�ͬʱ���ɵ���ת�ӹ���Ƶ��ʹʵ��ת��������ֵ���š�Ϊʹ���ת��ƽ�ȱ仯��������ʽ����ת�ӹ���Ƶ�ʵĸ���ֵ��S����
��S��=��1�����أ���(1����)��
����0<����1,������ת�ٱ仯�����ı䣬�ر��ǵ�ʵ��ת�ٽӽ�����ת��ʱ����ȡ��=1��
3��2ת�ӵ�����ֵ����λ![]()
![]()
![]() ����̬ʱ���ӵ�ѹ�ռ�ʸ��Ϊ�����ӵ����ռ�ʸ��Ϊ��ת�ӵ����ռ�ʸ��Ϊ�����Ƕ��ӵ���Ӱ�죬��[4]
����̬ʱ���ӵ�ѹ�ռ�ʸ��Ϊ�����ӵ����ռ�ʸ��Ϊ��ת�ӵ����ռ�ʸ��Ϊ�����Ƕ��ӵ���Ӱ�죬��[4]![]() (1)
(1)
�������ϵͳ�Ĺ������ؽǦգ���ǰ�ռ�Ϊ��ֵ���ͺ�Ϊ������������ֵ�գ������������б��ֲ��䣬����ڶ��ӵ�����С���ɵ�������й���С���Ӷ�Ҳ�ɵ���ת�١��������������ٶȽ��з�������ʱ���ٶȵ��������������Ϊ�Ƕ��ӵ�����С������ֵI1����Ϊ��֤ʵ�ʹ������ؽǦ�=�գ���Ӧѡ��ת�ӵ�����ֵ����λ��ʹ�ö�������I1�����գ������ʸ����ϵʽ��1��������
��ͼ2��֪��
xmI2sin��=x1I1cos��
U1��x1I1cos��=xmI2cos��![]()
![]() ��ѡת�ӵ�����ֵ����нǦȵ�����ֵ�ֱ�Ϊ��
��ѡת�ӵ�����ֵ����нǦȵ�����ֵ�ֱ�Ϊ��![]()
![]() I2��=
I2��=![]() �ȣ�=arcsin
�ȣ�=arcsin
���գ�=0ʱ������ֻ�ӵ��������й����ʣ��ڱû�����ʱ�ɳ�����õ��������
3��3����ת�ӵ�������ֵ����![]() ��I2�����ȣ������ת�ӵ�������ֵ��dq�������
��I2�����ȣ������ת�ӵ�������ֵ��dq�������![]() =I2��cos�ȣ�
=I2��cos�ȣ�![]() =��I2��sin�ȣ�
=��I2��sin�ȣ�
��֪���ӹ����Ƶ��Ϊ��1��������ת�ӵ�����Ƶ��Ϊ��s�����������ൽ�������ת�任����ͼ3��ʾ�����ת����������ĸ���ֵia����ib����ic���� ʽ�У���=��s��t��
ʽ�У���=��s��t��
���÷������Ʒ�������ʵ��ʵ��ת�ӵ����ĸ��ٿ��ơ�
ת�ٵ������ɲ��ó��õı������ֵ������������������ɸ���ϵͳ��Ӧ�ֳ����е�����

ͼ5������ͼ
4���Ƶ�·��Ӳ��������ʵ��
���ڿ��Ƶ�·��Ҫ��ת�ӵ�����ֵ����λ���з����Լ��㣬���ü�������������˵ġ����ǵ��������ϴ���Ҫ������ٶȿ죬��˿��Ƶ�·����Intel��˾��16λ��Ƭ��80C196KC[5]Ϊ���ƺ�����ʵ�֡�
�ɽ�����Ƶ����·ͼ��֪��ת���������Ϊ��ʱ��Ӧ�����龧բ�ܵ�ͨ���磬��֮�ɷ��龧բ�ܵ�ͨ���硣���ӵ�ͬһ��ת������������龧բ�ܲ�Ӧ��ͬʱ��ͨ���������ɵ�Դ��·�������豸�����Ӧ����ת����������ļ������������������龧բ�ܵĴ������塣ͬ�������ھ�բ�ܹض���Ҫһ��ʱ�䣬��ת�������������ʱ��Ӧ������������д������塣���⣬�������������ع���ʱ��ҲӦ�����������塣Ϊ���ϵͳ�����Ŀɿ��ԣ����ʱ��������Ӳ��������ʵ���������������
�ֳ��ɱ������PSD813F1�ں�128k���������洢����32k�ĵ�ɲ����洢����2k����洢�������ж��72�������ߵĿɱ�������м�����Ӳ����ʹ��һƬPSD813F1����������Ƶ�·�Զ������ʹ洢������Ҫ�����ܵ�Ҫ��[6]��
����·�����ӵ�ѹ�����ӵ�����ת�١�ת�ӵ��������롢�˲���任���0��5V�ĵ�ѹ�źţ���80C196���в���������ͬʱ������·ͨ���Ƚϵ��γ�ת�Ӹ�������Ĺ��������������źţ���Щ�ź�ֱ����PSD813F1�������ڲ��ɱ�̵��������������ɶԾ�բ�ܴ�������������������ơ�






