�������ͼ3���߿�����϶�ų�������ƣ�����õ����ŵ���

����ֵ����ת����ת�ǶȦ�r��ת��Ǧȣ�s��ӵõ���
϶������1����ת�Ƕ�

����d��q��ת����������¾�ֹ����ļнǣ������������ڱ�֤��϶�ų�

���������¿��Ƶ��ת�أ��ֿɿ�����϶�ų�����תλ�á����

����ת����任��2��3�任������任ģ��õ����������������ֵ

��

��
������DSP������DSPʵ����϶�ų�������ƵĻ����ϣ�����ת���ܵ��������������岽���ǣ�ͨ��λ�ü���·�Լ�ģ��ת��ͨ����ת��λ������Ȼ��λ��PID�������õ�����������ֵ

������ʽ��9��10�����Եõ�������������d��q��ת�������ϵĵ�������
��Ȼ����ݵ���������϶������1��ת�Ƕ�

����������任ģ���õ������������������ֵ

��
4��ʵ����
��������������Ʒ���������������������첽�������ϵͳʵ��ƽ̨������ʵ�������Ͻ����˵��ԡ�����ʵ�����ڿ�ת�ظ��������½��У���ת������������Ӱ�죬��ʩ����һ��Y����ľ��������ء�ʵ�����������£�
�����������飺2��24�۵���ͬ��ʽ���飬Rs1��33��15����Rr1��24��51����Ls1��0��011 23 H��Lr1��0��011 23 H��Lm1��0��078 H��J1��0��000 34��kg��m2�������������飺4��24�۵�����ʽ���飬������P2��2��Rs2��3��6����Ls2��0��009 H��Lr2��0��009 H������ʽת�ӣ�����mr��1 kg��������е��м�϶ֵ�ģ�250��m��
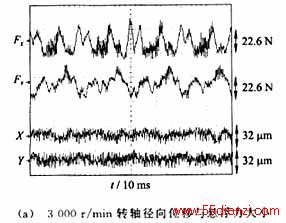
����ͼ5��a����FX��FY��ʾת����3 000 r��min����������ֵ���Σ�X��YΪת��ľ���λ�ơ����Կ���ת��λ�ڸ����������λ�ø���������X��Y�����ϵ�λ�Ʒ�Χ��ԼΪ��15��m��˵��ת�����븨��������룬ƽ�������ڿ��С���ʱ�����۲ⶨ�Ӷ��ϻ�е������У����Կ���������в���ת����ת�����ھ�ֹ״̬����Ҳ֤��ת��ʵ����������
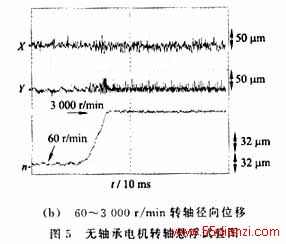
������ͼ5��b�����Կ�����ת�ٴ�60 r��min������3 000 r��min�����У�ת�ᾶ��λ�Ʒ�Χ��������30��m��ʼ�մ�������״̬����˵���ڱ��ٹ����У������������϶��������ת�ر仯���ı䣬�ɹ���ʵ������϶�ų����������ƣ�Ҳ����˵���ת�ؿ���������������֮�����������5�ݡ�
5��������
����������첽�����Ϊһ�����͵ĸ��ٵ������һ�������ǿ��ϵķ�����ϵͳ����������ϵͳ�ص㣬���������һ��˫DSP���ֻ�����ϵͳʵ��ƽ̨����Ӳ����·�ṹ���ɿ�����������ģ�黯��ƣ�����������ʵ��֤����ʵ��ƽ̨���кܺõ��ȶ��Ժ�ʵʱ�����������ﵽ������е�������Ŀ���Ҫ��
�����
��1�ݡ�����Ȫ�������⣮����н�������Ļ������ۺ��о���״��J�ݣ��繤����ѧ����2000��15��2����29��35
��2�ݡ�Deng Zhiquan��Zhang Hongquan��W ang Xiaolin��etal��Nonlineardecoupling controlofthe bearinglessinduction motors based on the airgap motor flux ori��entation��J�ݣ�Chinese Journal of Aeronautics��2001��15��1����38��43
��3�ݡ�Chiba A��Deido T��Fukao T��et al��An analysis ofbearingless AC motors��J�ݣ�IEEE Trans Energy Conversion��1994��9��1����61��68
��4�ݡ�½���������Ȫ�����������CRPWM��������첽���ʸ������ϵͳ��J�ݣ��Ͼ����պ����ѧѧ����2002��34��2����164��167
��5�ݡ�Chiba A��Power DT��Rahman M A��Analysis ofno��load characteristics of a bearingless induction motor��J�ݣ�IEEE Trans Industry Application��1995��31������1����77��83
��6�ݡ������գ��ź���������Ȫ���ȣ�DSP�����������·�벶��Ԫ�ڵ�������е����ã�J�ݣ���Ƶ�����磬2002��6��3����33��35
��һҳ [1] [2]
���Ĺؼ��֣�����ϵͳ �첽��� ��� �繤��ժ���繤���� - �繤��ժ






