Parameters Optimization for UPFC Damping Controller
Using Trajectory Sensitivity
ZHANG Lai, FANG Dazhong��YANG Xiaodong
(School of Electrical Engineering and Automation,
Tianjin University, Tianjin 300072, China)
����Abstract: A new approach for optimizing the parameters of supplementary damping controller of the UPFC is proposed. In this approach, the sum of generator speed is utiliz ed as the objective function. Trajectory sensitivity analysis is performed to ob tain the sensitivity of the objective function to the controller parameters and conjugate gradient method is adopted to optimize the parameters using the sensit ivity obtained. Simulation results on the New England test system show that the suggested method can damp low frequency oscillation effectively.
����Key words: unified power flow controller(UPFC); supplementar y damping controller; trajectory sensitivity; conjugate gradient optimization te chnique
1ǰ��
������Ͽ��վ�ķ������м��������������������־��ȫ���Եĵ��������γɡ�ȫ���Ե����γɺ����������������������������ϵͳ��Ƶ������Լ��������书���֧Ԯ����Ҫ����֮һ��
�����������ϵͳ(FACTS)�����ij���Ϊ���Ƶ�Ƶ���ر�����������ṩ���µ��ֶΣ�1��2�ݡ�ͳһ����������(UPFC)��Ϊ��������FACTS�豸�����Զ��������ʡ������ʺ͵�ѹ�ֱ���ƣ��������ϵͳ����̬�ȶ��Լ�����ϵͳ���������������á�Ϊ��ʵ��UPFC����ϵͳ�Ĺ��ܣ����������UPFC�������ƻ����ϸ���һ�����ƽṹ�����ڵ���ϵͳ�ȶ����Ŀ�������3�ݣ�������ź����ڵ��������ƻ��ڵIJο�ֵ���������͵Ŀ������ѳ�ΪUPFC������FACTS�豸����������Ƶ���Ҫ��ʽ��3��4�ݡ�
�������������켣�����ȼ����������뵽����ϵͳ�����в��ڵ���ϵͳ����ʶ���5�����ȶ��Է�����6������õ��˳ɹ�Ӧ�á����ף�7�������һ�ֻ��ڹ켣�����ȼ����Ż���Ƶ���ϵͳ�ȶ����������·�����ʹ�ø÷�����Ƴ��ĵ���ϵͳ�ȶ������˿����ϵͳС�Ŷ��ȶ�������ϵͳ�Է��Ե�Ƶ���⣬��������Ч������Ŷ������ϵͳ��Ŀǰ������켣�������Ż�������FACTS����������е�Ӧ�û�δ��������
�����������һ�ֻ���ʱ�����켣�����ȷ�������UPFC������������������Ż���Ƶ��·������÷������Ŷ����ת�ٵ�ʱ���ۼ�ֵ��Ϊ�Ż���Ŀ�꺯����ͨ���켣�����ȷ������Ŀ�꺯�����Ż��������ݶȣ�������ù����ݶȷ����в����Ż���ơ�����Ӣ����ϵͳ�ϵķ����������˸��Ż���Ʒ�������Ч�ԡ���
2��UPFC���������븽�ӿ���
 ��
��
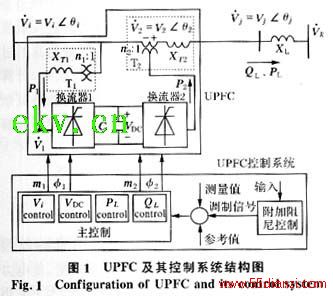
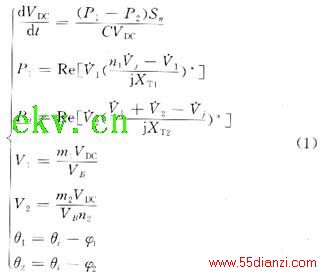
����ͼ1������UPFC�������ϵͳ��ʾ��ṹͼ��UPFC��Ҫ�ɱ�ѹ������������ֱ��������ɡ�����n1��XT1��n2��XT2�ֱ�Ϊ������ѹ��T1�ʹ�����ѹ��T2�ı�Ⱥ͵�Ч�翹��m1����1��m2����2�ֱ�Ϊ������1�ͻ�����2�Ľ�ֱ����ѹ�Ⱥʹ����ǣ�������UPFC���ɿز�����CΪֱ�����ݣ�VDC��ʾֱ�����ݵ�ѹ��P1��ʾ�Ӳ��������뻻����1���й����ʣ�P2��ʾ�ӻ�����2���봮������й����ʡ�UPFC�ڶ�̬�ȶ��о��г�������ʽ(1)��ʾ�Ķ�̬ģ�ͣ�8�ݡ���ģ���У����������ñ���ֵ��ֱ������������ֵ��
��
2.1UPFC������
����UPFC�����ƹ��ܰ����������ơ�ֱ�����ݵ�ѹ���ƺ�ĸ�ߵ�ѹ���ơ�UPFC�Ĵ�������Ҫ������·�Ĺ��ʿ��ơ���ͨ�������������Ĵ����ǿ��ƺ͵�ѹ�ȵ���ʵ��UPFC���������·�й����ƺ������ƣ���ͼ2(a)��ʾ��UPFC�IJ��������Ϊ��������֧��ĸ�ߵ�ѹ������Ϊ�������ṩ������й�������ά��ֱ����ѹ�㶨����ͨ����������������ѹ�ȵ���ʵ��ĸ�ߵ�ѹ���ƣ���ͼ2(b)��ʾ��ͨ�������������Ĵ����ǿ���ʵ�ֲ������ֱ����ѹ���ƣ���ͼ2(c)��ʾ��

2.2UPFC���ӿ���
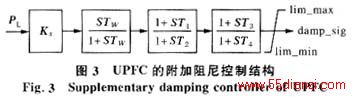
����UPFC�ĸ���������ƾ��������ڵ���ϵͳ�ȶ����Ľṹ����ͼ3��ʾ�������������������·���й�������Ϊ�����źţ��������Ϊͼ2(a)�е���������ź�dampsig�����Ե�����·���ʿ��ƵIJο�ֵ���Ӷ��ﵽ����ϵͳ���ᡢƽϢ������Ŀ�ġ�
 ��
��
3�켣�����ȷ���
�����켣�����ȷ�����9��������ַ���ģ���о�״̬�����Բ��������Եķ����������������Լ�ѡȡϵͳ��������ʮ����Ҫ��ָ�����塣������ܹ켣������ϵͳ���Ƶ����̡��������ϵͳ�Ķ�̬ģ�Ϳ���һ���ִ���������������
���� ��
��
ʽ�У�x��״̬����������y��ʾ��������������������Ʋ����������ڱ����Ц���UPFC����Ks��T1��T2��T3��T4��ɡ�������(2)-(3)�Ľ�켣�ɱ�ʾΪ
����
�������ַ���(2)���л��ֿ��Եõ�
����
Ȼ��ʽ(6)�Ԧ������ɵ�
��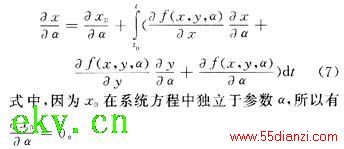
������ˣ�ϵͳ�켣�Բ����ڦ�=��0�Ĺ켣�����ȿ��Ա�ʾΪ
����
����Ϊ�˱��ڱ�ǣ��ֱ���ϵͳ�켣x(t)��y(t)�Բ������ڦ�=��0�Ĺ켣������Ϊx��0��y��0����
����
������ʽ(3)�������������Ƶ�������(���Ц�=��0)�ɵ�
�� ��
��
ʽ(10)�У�A(t����)=f(x��y����)/x�������ſɱȾ���B(t����)��C(t����)��D(t����)��E(t����)��F(t����)�����Ʊ�ʾ����Ҫע����ǣ�A(t����)��B(t����)��C(t����)��D(t����)��E(t����)��F(t����)��ʱ�����������ϵͳ����x��y�仯��
�������Ľ��ִ���������(2)-(3)��Ϊ�켣ϵͳ�������ִ�������(10)-(11)Ϊ�켣������ϵ ͳ���ڶԹ켣ϵͳ(2)-(3)����ʱ�����Ĺ����У�����ͬʱ�Թ켣������ϵͳ������⣬������������Ϣ�����ף�9���������ⷽ�����켣������ϵͳ��Ϊ�켣ϵͳ����һ������Ʒ��ʹ�����켣�����ȵļ������������١�
4UPFC�����Ż�
4.1�Ż�ģ��
�����Ż�UPFC���������������Ŀ����ʹUPFC�Ը��ֻ�����ģʽ�ṩ������ᣬʹ����ϵͳ������ٶȵ�����Ϻ��ȶ����е㡣���IJ��ô��Ŷ���ϵͳ�з�����ٶȹ켣������ϵͳ������Ч��������֮��ʹ�Ŷ���ϵͳ�з�����ٶȹ켣˥������UPFC������������������ŵģ�10�ݡ������������⣬����������²����Ż���ѧģ��
����
ʽ�У�nΪϵͳ�����з������Ŀ��mΪʱ��������ɢʱ������� Ϊ��������(center of inertia�����COI)�����ܣ�11���·�����ٶ������������������ⷽ����(2)-(3)��ɵ�ͬ���������µķ�����ٶȱ������������±任��ͬ�������е�ת��Ϊ�������������µķ�����ٶ�����
Ϊ��������(center of inertia�����COI)�����ܣ�11���·�����ٶ������������������ⷽ����(2)-(3)��ɵ�ͬ���������µķ�����ٶȱ������������±任��ͬ�������е�ת��Ϊ�������������µķ�����ٶ�����
����
����Mi��ϵͳ��i��������Ĺ���ʱ�䳣������coi�����������������ͬ��������ܵ��ٶȡ���
4.2Ŀ�꺯�����Ż��������ݶ�
�����Ż�����Ҫ�õ�Ŀ�꺯����UPFC����������������ݶȡ���ϵ���ϵͳʱ�������е�3�ڽ��ܵĹ켣�����ȷ��������Ի��ÿ������ʱ���ķ����ת�٦�i�����UPFC����������������������Ȧ�ai������i�ͦ�ai����ʽ(16)���ɵõ�Ŀ�꺯�����Ż��������ݶ�∂ J/∂����
����
4.3Լ�������Ĵ���
������u�������д��Ż�������������ʽ(12)�ɼ�дΪ
����
�������IJ������Ǻ��������Ա任�ɽ���Լ���ķ����Թ滮����ʽ(17)��Ϊ��Լ���ķ����Թ滮 ���⡣
���� ��
��
ʽ��bi��ʾ�����µĵ�i��Ԫ�أ����ʼֵ��ȡֵ
��
��Լ���ķ������滮����ʽ(17)�����ʽ(20)��ʾ����Լ���滮���⡣
���� ��
��
4.4�Ż�����
�������IJ��ù����ݶȷ�����Ż����⡣�����ݶȷ���ÿ�ε��������н���ǰ�ݶ���Ϣ�����е��������������Խ�ϣ���õ�ǰ��������Ȼ�����ŵ�ǰ����������һά�����Ż������һά�Ż�����ݶ���Ϣ�����������һ��������������Ż��������£�
����1)��k=0��������ʼ���Ƶ��(0)���������Ȧţ�
����2)���������ȷ���������g(0)=∂ J(0)/∂��(0)��
��






