1.3 C段故障时
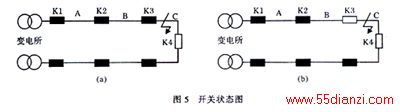
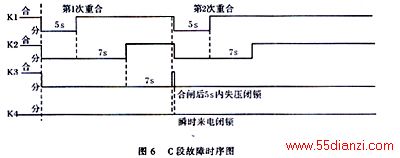
设故障前线路运行状态如图5(a)所示。当C段发生故障时,K1跳开,K2、K3分闸 。K1延时5 s后第一次重合,K2、K3在得电后依次延迟7 s合闸,因K3合于故障,故K1再次跳闸,此时,K3因“合闸后5 s内失电”而启动闭锁合闸,K4因感受到“失电后瞬时来电”同样启动闭锁合闸。K1经过5 s后进行第二次重合,使A段恢复送电,K2在延时7 s后重新合上,使B段恢复送电,C段因K3、K4闭锁合闸而被隔离见图5(b),上述过程的时序见图6。
2 故障区域的计算机判定
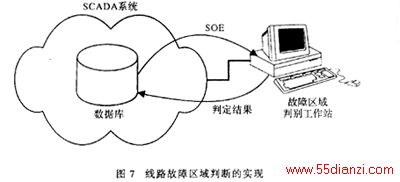
由于就地智能模式的配电自动化技术在杆上各开关控制器与变电所或调度所中心之间没有建立通信联系,所以线路上各开关的运行状态如何,就不能象SCADA系统那样实时地反映在计算机画面上。因此,当线路某处发生永久性故障时,有关人员就不能尽早地了解这一信息,通常是要靠用户投诉以后才能知道何处发生停电故障 ,从而延误了检修时间。如何及时地把故障区域直接自动地显示在SCADA系统的计算机显示画面呢?其基本思路是:利用变电所内自动化系统(或远动装置)采集到的开关事件顺序记录(SOE),分析有关线路开关动作的时间特征,并据此判出该线路故障区域。其实现方法之一如图7所示。图7中所示的被挂接在SCADA系统上的计算机(称故障区域判别工作站)将用于实现配网线路故障区域的自动判定,其任务就是从SCADA系统数据库里取出SOE记录,进行分析、判别,并将判别结果送回数据库,供有关工作站调用和共享。
SCADA系统数据库保存了该系统所采集的各个变电所设备的遥测、遥信信息,其中包括开关动作的事件顺序记录(记录了变电所中各开关每次合/分的具体时间,精确到毫秒级)。在开关动作的事件顺序记录中,有很大部分是与故障区域分析判别无关的信息,应加以剔除,因为软件所需要分析的只是与杆上配电自动化相关的一些线路开关的SOE记录。处理过程大致如下:
(1) 读取SCADA系统的SOE记录,剔除无关部分。
(2) 进行分类和排序(按线路开关编号分类,按动作时间排序)。
(3) 计算每个开关在运行状态由跳闸到第一次重合,由第一次重合到再次跳闸 ,此次跳闸到第二次重合等时间段。
(4) 根据计算结果和开关最终的运行状态,与前述的典型时序进行比较,确定故障是在本线路的第几段中。
(5) 将确定的结果送回到SCADA系统数据库中预定的共享画面上,供调度员、运行值班员或配电线路检修人员查阅和参考。
该方法简单易行,实时准确。不需要修改SCADA软件,也不用在变电所内的线路开关上加设装置,充分利用了SCADA系统现有的信息资源和该系统提供的实时性。
虽然以上讨论假定线路均是不分支的,但其原理同样适用于分支线路,所不同的只是将分支线上开关的延时整定为不同于干线上任一开关的延时即可。
3 结束语
在当前的技术经济条件下,对如何进行配电自动化建设,采用哪种配电网自动化模式,现在还没有统一的规范和标准。采用就地智能模式的杆上配电自动化方案是较有效、经济的方案之一,同时也是高层模式配电自动化的基础。如果在规划和设备选型上做到留有“四遥”接口,那么一旦通信条件具备,就很容易升级。虽然较高层次的配电自动化模式比就地智能模式要优越得多,但它的投资是巨大的,对供电企业来说,花同样的投资所得到的投入产出比是大不一样的。因此,在第1种模式下,如何利用现有的一些资源和条件,克服其缺点,是具有实际意义的。
本文关键字:智能 电工文摘,电工技术 - 电工文摘






