1引言
随着功率电子元件制造工艺的成熟和DSP技术的发展,基于PWM调制的高频交流变频调速系统已经得到了广泛的应用。目前,大部分交流电机设备的调速系统都采用三臂三相逆变器的驱动方式。但在某些应用场合需要n(n>3)臂n相逆变器来驱动n相电机。
首先,对可靠性要求很高的设备,可以采用多相系统来降低不正常非对称运行的影响[1]。另外,功率很大的设备也可以采用多臂多相系统,以降低单个开关元件的负荷。大功率的系统可以采用多重逆变器供电的三相电机系统或者采用多臂逆变器供电的多相电机系统。Zhao和Lipo等对六相逆变器供电的六相电机进行了深入的研究[2]。多重逆变器的研究工作也有很多[3]。对这两种系统的开关形式进行比较可知,多重逆变器通过增加串联开关设备以提高输出电压方式增大输出功率,而多臂逆变器是通过增加并联开关设备,增加相数以增加输出电流的方式增大输出功率。
多相系统的一种新的应用交流电机的极相调制。极相调制是一种扩展感应电机的速度—力矩控制范围的技术。Osama和Lipo等提出了在一个二重定子绕组的六相感应电机调整两种不同的极数配置(2∶1极数比)达到力矩和速度控制要求的方法[4]。在该种方法中,极数的改变通过两组三相逆变器中的一组逆变器的输出电压相位的改变来完成。
鉴此,本文提出一种将三相SVPWM逆变技术进行扩展而得到的多臂多相SVPWM逆变器,并对由多臂多相逆变器供电、负载星形连接系统的SVPWM实现方法加以详细的阐述,同时对多相SVPWM和多相SPWM进行了比较。在此基础上归纳出多相SVPWM的理论和实现方法。为了便于论述,下文以9相逆变器作为多相逆变器的特例。文章的最后部分给出了多相SVPWM调速系统的相关实验数据。
2 9相逆变器分析
如图1所示的9相逆变器主电路由18个功率开关元件组成。
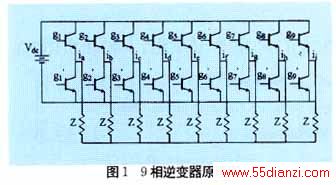
由于在实际应用中,上臂导通时,对应的下臂必须关断,如g1导通,![]() 就必须关断,即开关状态
就必须关断,即开关状态![]() 。故9个开关状态[g1,g2,g3,g4,g5,g6,g7,g8,g9]即能决定逆变器输出的各相相电压。
。故9个开关状态[g1,g2,g3,g4,g5,g6,g7,g8,g9]即能决定逆变器输出的各相相电压。
2.1负载电路分析
与三相逆变器只有一种等效负载电路不同,n相逆变器有[n/2]种可能的等效电路([n/2表示n/2以后取最大的整数)。如图2所示,9相逆变器可以组成4-5结构、3-6结构,2-7结构、1-8结构共四种不同的等效负载电路。

例如,开关状态![]() 时,负载等效电路由4个并联阻抗组与5个并联阻抗组串联而成。当开关状态为[111000000]时,等效负载由3个并联阻抗组与6个并联阻抗组串联而成。其中“1”表示上桥臂导通而下桥臂关闭。
时,负载等效电路由4个并联阻抗组与5个并联阻抗组串联而成。当开关状态为[111000000]时,等效负载由3个并联阻抗组与6个并联阻抗组串联而成。其中“1”表示上桥臂导通而下桥臂关闭。
表1给出了9相逆变器四种不同负载电路的等效阻抗、电源电流和最大相电流。作为比较,也给出三相逆变器的数据。在四种可能的负载电路结构中,4-5结构的好处在于最大相电流较小,而且相电流与源电流之比最小。在1-8
上一篇:负载串联谐振逆变器的逆变控制策略






