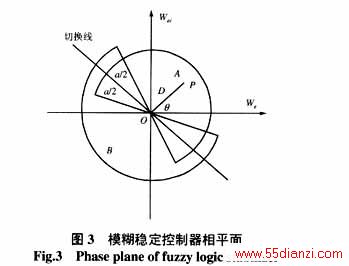
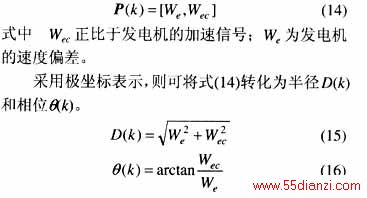
O点为发电机的平衡状态,稳定控制的作用就是力图使当前状态点P(k)移回原点。显然,在A区应提供减速控制,而在B区则应提供加速控制。励磁控制作用不仅与当前状态点所处的相平面区域相关,同时还应与相点与平衡点的距离相关,根据文献[5],有
![]()
式中 N(q)和P(q)分别表示A区和B区的角度隶属函数;G(D(k))表示极半径的隶属函数。
控制器的性能可以通过Dr(对应于极半径隶属函数为1时的极半径值)、Kfc来调整。Dr可根据经验或仿真计算取某一定值,Kfc则根据发电机速度偏差和加速度的大小进行在线调整。当速度偏差与加速度同号时,说明是偏离平衡状态,应采用较大的Kfc;而当速度偏差与加速度异号时,说明是趋向平衡状态,则采用较小的Kfc。

式中 e
是一为防止零除的小的正数。
Kfc的在线调整有两个方面的作用,一是进行规则的调整,它将Wec和We上的相平面的切换线映射到Wc和We上。二是改变了极坐标向量的幅值大小,即调整了控制作用的大小。
3.3 电压和稳定控制的协调
对于稳定控制部分,考虑电压约束条件,即在改善系统稳定性的同时,应不使发电机的机端电压偏离额定值太远,并保证足够的电压调节精度。为此,参照文献[7],建立如下的稳定控制规则:
(1)当发电机的状态位于切换线的右侧,稳定控制的输出将加大励磁控制。此时,若机端电压低于允许的最大电压,则这种控制是允许的;若机端电压高于允许的最大电压,则稳定控制的输出必须被抑制。
(2)当发电机的状态位于切换线的左侧,稳定控制的输出将减小励磁控制。此时,若机端电压高于允许的最低电压,则这种控制是允许的;若机端电压低于允许的最低电压,则稳定控制的输出必须被抑制。
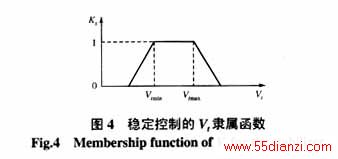
根据上述两条规则,在稳定控制与电压平面中引入梯形隶属函数如图4所示。
当发电机机端电压处于额定值附近,且发电机的速度偏差较大时,为加快稳定控制作用,此时可适当对电压控制进行抑制,有

4 仿真研究
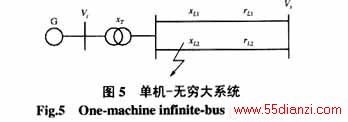
根据上述所建立的模糊自适应PID励磁控制器,对图5所示的经升压变压器后双回路输电线路的单机-无穷大系统,分别进行了下列三种扰动情况下的仿真对比试验。
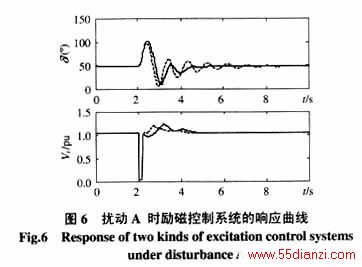
扰动A:2s时一条线路首端三相短路,2.15s时断路器跳闸,2.75s时重合闸成功(图6)。
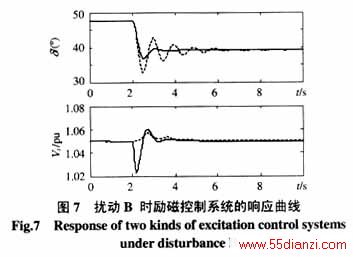
扰动B:原动机力矩从1.0突变至0.8(图7)。
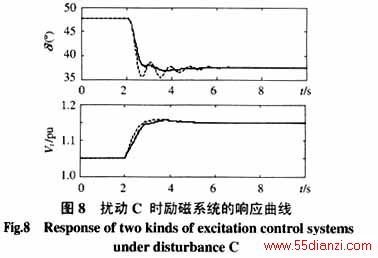
扰动C:给定参考电压突变10%(图8)。
图中,xL1=xL2=0.6,rL1=rL2=0.1,xT=0.01。
发电机参数和仿真对比用的PID+PSS励磁控制器参数见文献[12]附录。

仿真曲线图6至图8中,转子角单位为度,其余均为相对值。虚线为PID+PSS励磁控制器的响应曲线,实线为所论模糊自适应PID励磁控制器的响应曲线。显见,所论模糊励磁控制器不仅可以提高在三种不同的扰动情形下系统的稳定性,还可减小电压给定扰动时发电机机端电压的上升值。
5 结论
本文在解析模糊控制器的基础上,引入非线性函数来改善解析表达式描述的模糊控制器的控制性能,建立了一种新的模糊控制器,其本质为一非线性的PID控制器。由于采用非线性描述的解析表达式描述控制规则,实际使用时,无需进行控制规则的设计,且所论模糊控制器的参数可以采用常规PID控制器的参数整定方法进行整定,解决了模糊控制器的参数整定问题,简化了控制设计。
利用所述非线性解析模糊控制器,建立了一种顾及电压调节精度和增强阻尼要求的发电机模糊励磁控制器结构,引入变结构控制的思想来进行附加励磁控制,并兼顾电压调节和稳定控制的需要进行电压控制与稳定控制的协调。仿真结果表明了所述方法的正确性。
本文所论自适应模糊PID控制器在控制过程中,基于误差和误差变化率的大小,具有参数自调整和规则自适应的特性,可较好地满足励磁控制系统的需要。且具有实时性强易于实施的特点,可在工程实际中应用。
本文关键字:发电机 电工技术,电工技术 - 电工技术






