1 引 言
滤池作为保障水质的重要环节,其作用越来越受到重视,滤池恒水位控制技术也随之不断发展,从模拟PID、数字PID到最优控制、自适应控制,再发展到智能控制,每一步都使控制的性能得到了改善。本文以郑州市柿园水厂为例,将改进的PID算法应用到滤池自控流程中,使其能够根据水位的变化实时控制清水阀开度,从而使水位始终保持平衡。
2 PID算法在恒水位控制上的实现
2.1 PID控制算法
PID(Proportional Integral Differential)控制算法就是经典的闭环控制,它是连续系统中技术最成熟、应用最广泛的调节方式。PID调节的实质就是根据输入的偏差值,按比例、积分和微分的函数关系进行运算,其运算结果用以输出控制。在系统输出误差绝对值较大时系统采取饱和输出工作方式,这样可以减小液位系统的时滞性,同时为了防止系统过大的超调量,在系统误差的绝对值比较小时采用增大积分系数的办法,从而可以提高系统的稳态精度。微分控制算法简单,参数调整方便,并且有一定的控制精度,能感觉出误差的变化趋势。增大微分控制作用可加快系统响应,使超调减小,可以获得比较满意的控制效果,因此它成为当前最为普遍采用的控制算法。
PID控制器,其控制规律为:
 (2-1)
(2-1)
由于式(2-1)为模拟量表达式,而PLC程序只能处理离散数字量,为此,必须将连续形式的微分方程化成离散形式的差分方程。令
 (2-2)
(2-2)
则可得可得到位置式数字PID算法
![]() (2-3)
(2-3)
使用位置式PID数字控制器会造成PID运算的积分积累,引起系统超调,这在生产过程中是不允许的。由此,经过转换得到增量式算法
![]() (2-4)
(2-4)
增量式PID控制算法是对偏差增量进行处理,然后输出控制量的增量,即执行机构位置的增量。增量式PID数字控制器不会出现饱和,而且当计算机出现故障时能保持前一个采样时刻的输出值,保持系统稳定,因此在此系统中增量式算法被采用作为编程算法来使用。
2.2 恒水位控制
为保证生产安全,滤池分站的待滤水流量和滤后水流量应基本保持平衡,所以每个滤格在过滤时应保持水位恒定。正常滤水工作期间,每组滤池在就地PLC控制台的控制下,依据来水量的大小,及时调整滤水阀的开度,保证滤池恒水位运行;当达到反冲洗条件或人为强制反冲时,每组滤池就地控制柜向主站发出反冲洗请求,主PLC对需要反冲洗的滤组进行排序,采用先进先出的堆栈式管理,在满足反冲洗条件后,调整首先要反冲的滤组的阀门状态,待水位降到一定高度后,启动鼓风机,进行气洗,按约定时间气洗结束后,开启反冲泵进行气水联洗,联洗结束后,关闭鼓风机,再开启一台反冲水泵进行水洗,水洗结束后,恢复本组滤池的正常滤水状态,进行下一组反冲洗。所有反冲结束后,进入正常的恒水位滤水工作周期。
由于恒水位的根本目的是保证待滤水流量与滤后水流量基本恒定,因此转化为控制各个滤格的水位保持基本恒定。用PID闭环控制可以根据水位的变化实时控制清水阀开度,把以上所有影响水量变化的条件转化为滤格水位的控制。
2.3 PID对清水阀的逻辑控制指令及参数的设定
当进水量增大或因池内水头损失增大导致出水量减少,使水位上升高于设定水位时水位偏差e为正,e越大则u也越大,从而使出水阀开度增大,相应地出水量也增大,使水位下降趋于设定水位;当进水量减少或因其它因素使水位下降低于设定水位时,水位偏差e为负,e的绝对值越大则u越小,从而使出水阀减小开度,相应地出水量也减小,使水位上升趋于设定水位,从而把水位控制在以设定水位为中心的一定波动范围之内。从式(2-1)中的积分控制项可知,控制器输出u与积分时间T成反比:当T较小时,相同的水位偏差将造成较大的积分控制作用。若积分控制作用过强,将造成过调现象:当水位偏离设定水位时,过强的积分控制作用使出水阀开度改变过大,使水位矫正过大,造成大的振荡起伏,积分时间T愈小,过调现象愈严重,被控量(水位)的振荡幅度愈大,最终超出允许范围。因此,正确设定控制参数是保证控制系统能达到设计要求的重要前提。对于实际生产过程,要精确确定其数学模型比较困难,本系统是通过试验方法来确定控制参数。
设定完参数后,根据现场实际情况在外部程序还可进行一些特殊的程序处理,如该项目中作了以下处理:
① 把PID的计算结果放到一个中间变量中,当水位处于设定水位的上下5 cm以内,3分钟输出一次PID的计算结果到输出模板;反之10秒钟输出一次PID的计算结果。这是为了水位在可接受的范围之内尽量少动作清水阀,但超过范围以外则以保证生产安全和水质为第一,同时很大程度上消除了输入模拟量在受到外界干扰时而出现的计算误差。
② 即使在上述条件满足的条件下,程序会比较当前的PID计算结果与上一次输出值的差值,如开度在两个开度范围以内则不输出当前PID计算结果,反之则输出计算结果。因清水阀开度在两个开度范围以内对水位调节作用不大,而小开度调节清水阀会出现阀门开度不到位而造成电磁阀频繁动作的现象。
③ 当清水阀开度小于10个开度时,过水量基本与全关时一样,因此我们把PID计算结果为7个开度以下就直接输出全关信号。
2.4 PID控制梯形图子程序
每个滤池的自控部分的实现需要数字量输入点28个,数字量输出点18个,模拟量输入输出点13个,整个PLC自控系统具有自保护和掉电数据保护功能,在发生供电及其他严重故障时,可立即进入紧急处理状态,工艺条件和程序时间都得以记忆,待故障消除后,系统能够立即恢复到故障前的状态,大大提高了整机可靠性。表1为PLC系统的I/O地址表,这里仅仅列出了主要的I/O地址。
表1 PLC控制I/O地址分配表(部分)
通过以上参数就可以完成相应的控制过程在水厂滤池自动化的安装调试阶段,数据采样频率恒定,系统调试人员通过调整相应的参数,使滤后水阀开启度随滤池水位的高低而变化,进而使滤池水位基本保持(2.00±0.20)m范围内。图1为滤池在反冲洗过程中部分梯形图程序:
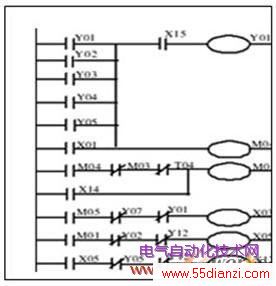
图1 滤池在反冲洗过程中部分梯形图程序
3 运行效果前后对比
调试后我们经过统计,基本上一天的清水阀动作次数小于200次,比其它水厂一天平均4000次要少得多,基本上与手动凭经验调节清水阀的效果相同,但大大的减少了工人的劳动强度。但各个水厂的实际情况有所不同,所以在系统调试过程中所处理的手段也会有所不同,参数设置也会有所不同。
经过对滤池改进前后数据分析,绘制出下面的波动曲线对比图。通过对图2和图3可以看出,经PID调解后的滤池水位变化很小,滤池液位能够保持恒水位运行。

图2 滤池改进前水位曲线

图3 滤池改进后水位变化曲线
4 小 结
本项目应用于郑州市柿园水厂的滤池自动化改造系统中,系统以工控机为核心,采用了模糊化积分分离数字PID控制方案、梯形图语言以及组态王软件。该系统经过三个月来运行,完全符合生产要求,系统的可靠性、易操作性和信息容量都有了很大提高,真正实现了现场的滤池自动化管理,实现了自动过滤和定时自动排队及反冲,新系统使滤池的净水效果得到很大改善。采用标准PID控制软件包实现了对滤池水位的闭环自动控制,使多组滤池同时自动运行,运行水位保持在工作水位的4%范围内。恒水位的控制使得滤池反冲洗次数减少,水量和电量损耗减少1/3,产生经济效益300万元,大大降低了生产成本,同时还改善了水质,具有重要应用价值。
本文作者创新点是将改进了的增量式PID算法与恒水位控制相结合,优化恒水位控制方法,降低水耗及电耗,减轻工人劳动强度,提高了滤池水处理的自动化水平和效率。
本文关键字:暂无联系方式供水环保,应用领域 - 供水环保






