1 引言
随着工业自动化、计算机网络、dsp技术的发展,变频器作为交流调速的重要手段在工业生产中获得越来越广泛的应用。当今世界能源紧张成为全球性问题,节能更显重要,而变频器的应用对电力、石油、化工、冶金、水资源等工业中的风机、水泵、压缩机等,取代传统挡风板、节流阀,可根据负荷大小适时控制风量和流量,显著提高节能效果。另外,还可以改善和适应运行环境,平滑加减速、提高加工工艺等功能。变频器网络的控制功能是将多台变频器通过串口与上位机相连,上位机实时对多台变频器操作、监控、及故障报警,并能嵌入profibus等现场总线,提高了控制的灵活性。
三维力控pcauto31组态软件是国内最早用于internet的软件,是基于b/s应用的组态软件,也是国内应用案例最多、规模最大的基于pc的采用“软plc”控制的、hmi/scada的组态软件。
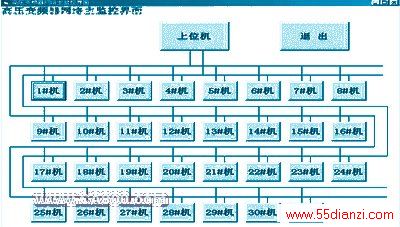
本文介绍的变频器网络: 每台变频器可驱动1~2台电机;经rs-485进行网络控制,采用菊花链方式最多可连接31台变频器,通讯距离最长可达1.2km。图1是上位机与多台变频器通过rs-485组成的控制网络。上位机利用pcauto31强大的实时数据库功能,实现监控电机的实时运行状态。

2 系统要求
实现对控制网络中的各个位置的电机正、反转,起、停机,加、减速,及故障报警、历史趋势、数据共享等,实现报表的自动生成以及生产的高效管理。使生产过程操作简单、降低控制、维护成本。
3 通讯协议
上位机作主机监控变频器的运行,变频器作从机,采用rs-485半双工方式。
通讯设置由变频器和上位机设置为相同即可。其中传送速度设置可从1200bps至19200bps;数据长度可为7位或8位;奇偶检验可设为无校验、奇校验、偶校验;停止位可为1位或2位;无应答时间可设为1s至60s;间隔时间可设为0s~1.00s ;通讯错误有检验和错误、奇偶校验错误、格式错误、超时错误、命令错误、链接优先错误、功能代码错误、数据错误等。
每台变频器都被赋予唯一的站地址,且处于等待上微机来选择(要求写入)或查询(要求读出)状态。变频器在收到与自身站地址相同的上位机要求帧后,判断为正常收信后对要求帧进行处理,然后返回肯定回答帧(若为查询帧则数据和应答一起返回);否则返回否定回答帧。
通讯协议实现如下功能:读出变频器所有参数设置,及所控电机的基本参数;可启动、停机、加减速、复位等;可对当前运行状态进行监视,包括电机输出频率、设定频率、输出电流、输出电压、转矩电流、转矩计算值、运行命令等。通讯协议包括两类帧格式:标准帧和选用帧两类,每一类都包括选择帧和查询帧两种,每种帧都包括要求帧和应答帧。构成帧的所有字符都用ascii码表示。标准帧适用于所有通讯功能,选用帧仅限于输入变频器命令和高速通信时监控用。
其中标准帧格式如 (上位机 变频器):
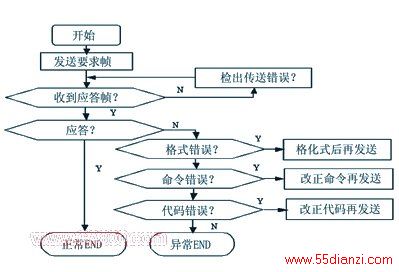
其中起始位表示帧的开始(01h);2字节的站地址位包括站号十位和个位(1~31);请求位表示从上位机至变频器的要求(05h),若是肯定回答帧此位为06h,否定回答帧此位为15h;命令位包括读出、写入、高速写入、报警复位;种类位包括基本功能、控制功能、高级功能、设定数据、监视数据等;2字节的号码位表示要获取的数据号码的十位和个位;4字节的数据位表示要写入或读出的数据;2字节的检验和位(由检验和十位和个位组成)用于检查数据传送时通信帧中有无错误,计算方法:除起始位及检验和外,其他字段的字节逐个相加,取其低位字节,再用ascii码表示。比如上述的和计算结果为1234h,则检验和的十位为ascii码“3”值,个位为ascii码“4”值。图2为主机侧执行查询时流程图。
选用帧中选择要求(写入)帧格式如(上位机 变频器):
写入帧格式
选用帧中查询要求(读出)帧格式如 (上位机 变频器 ):
读出帧格式
其中选用帧中站地址位,请求位及检验和位与标准帧中一样,但命令位却不同。
本设计用rs-485将多台变频器连接成网络,所以本设计的通讯帧中有专门的广播帧用于此功能,如同一对所有变频器的输入运行命令和频率命令进行设定。广播帧格式与标准帧格式一样,区别在于其中的“站地址”位设定为:99号机。
由于本系统采用的变频器在pcauto31中无驱动,所以需采取其他方式。pcauto31是基于odbc标准的,所以它提供与第三方软件的通信方式,这里采用dde或ole方式可以很方便的实现通讯功能。
4 组态设计
(1) 画面设计
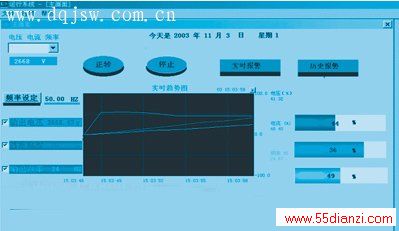
图3为主操作画面,包括31台变频器的状态监视,可查看任何一台变频器的运行状态并可设置其参数;可对上位机进行通讯方式及其它设置。图4为1#变频器的监控组态界面;其中包括主要数据:电流、电压、频率的列表显示、动画显示及实时曲线显示;便于从直观上了解电机的运行状态。一旦出现报警情况则立即进入报警状态,并根据报警内容作出相应处理(如紧急停机等)。可实现电机的正反转、加减速、停机等控制,还可以获得一些历史数据(表、曲线、图)、故障报警等。极大的方便了生产操作人员对一线现场的监督、控制、管理。实践证明本系统的实时性很好,能很好的反映实际数据的变化。
(2) 建立实时数据库
在draw的导航器中单击“实时数据库组态”,启动实时数据库组态程序。创建的数据模拟i/o点主要有:正转命令frw.pv;反转命令rev.pv;停机命令stop.pv等;并对各点参数进行设置。
(3) 创建按钮
主要有正转、停机按钮等。如在正转按钮的属性中将其变量名取为与正转命令frw.pv同名,并定义其为数据库变量,其他同理。
(4) 添加脚本及i/o数据连接
在组态状态下,打开正转按钮动画连接主对话框,选择“触敏动作”中的“一般动作”,出现脚本编辑器,在脚本编辑器内写下如下脚本:frw.pv=1。表示正转按钮按下时数据库变量frw.pv状态就为“1”,这样就将按钮状态与数据库变量的值连接起来。正转按钮的状态可以通过dbcom控件将正转命令实时感知给第三方软件,再通过第三方软件的实时查询正转命令状态,然后对其按照通讯协议编程发出正转命令,这样电机就正转。例如可以利用vb6.0中的mscomm 控件轮询的方法(用doevents()函数)轮流从网络中各变频器端口获取数据,写数据时将轮询事件封死。
(5) 添加脚本及i/o数据连接
在组态状态下,打开正转按钮动画连接主对话框,选择“触敏动作”中的“一般动作”,出现脚本编辑器,在脚本编辑器内写下如下脚本:frw.pv=1;rev.pv=0;stop.pv=0。表示正转按钮按下时数据库变量frw.pv状态就为“1”(表示此时为正转命令有效,否则为无效,并封锁其它命令;让反转、停机命令都无效),这样就将按钮状态与数据库变量的值连接起来。正转按钮的状态可以通过dbcom控件将正转命令实时感知给第三方软件,再通过第三方软件的实时查询正转命令状态,然后对其按照通讯协议编程发出正转命令,这样电机就正转。例如可以利用vb6.0中的mscomm 控件轮询的方法(用doevents()函数)轮流从网络中各变频器端口获取数据,写数据时将轮询事件封死[2]。如果电机处于正转状态时,现在要实现反转功能,则首先给电机发出停机命令,检查到频率值为0时再发出反转命令,电机就可以反转运行了。
上一篇:汇川变频器在精密雕刻机上的应用






