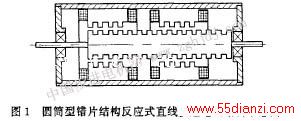
 电机的结构如图1所示,它是采用圆筒式结构,初级定子铁心分成两段,每段铁心绕有两相绕组,定子铁心的冲片结构如图2所示。
电机的结构如图1所示,它是采用圆筒式结构,初级定子铁心分成两段,每段铁心绕有两相绕组,定子铁心的冲片结构如图2所示。
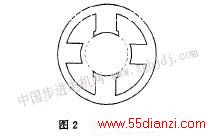 定子冲片有4个大极,它们的形状不完全相同,相对的两极形状一样,相邻的两级内径不同。现在假设任意相对的一对极为A相,那么,将第一片冲片按A相竖直放置,第二片冲片旋转900后放置,使其内径不同的2个极间隔开,这样重复叠片,就组成了一段定子铁心。内径不同的两个极沿轴向间隔开,内径大的极形成了定子的齿,而内径小的极形成了定子的槽,定子齿距为冲片厚度的2倍。动子铁心是由内径相同、外径不同的两组冲片交替间隔放置,外径大的冲片形成了动子的齿,外径心的冲片形成了动子的槽,而齿和槽在圆周方向是连续不间断的。当定子的一对极与动子的位置关系为齿对齿时,那么与定子这对极相垂直的另一对极与动子的位置关系就是齿对槽,若一对极的绕组为A相绕组,则另一对极的绕组就是C相绕组。同理,另一段铁心的两组绕组组成了电机的B相和D相。两段定子铁心之间的距离应满足下式:
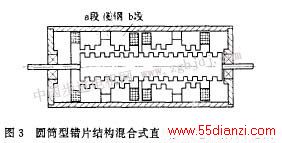
如果在上述错片结构反应式直线步进电机的每段铁心上再加上磁钢,同时,保证磁钢的轴向厚度为:h=Kt1,如图3所示,就成为错片结构混合式直线步进电机。
定子冲片有4个大极,它们的形状不完全相同,相对的两极形状一样,相邻的两级内径不同。现在假设任意相对的一对极为A相,那么,将第一片冲片按A相竖直放置,第二片冲片旋转900后放置,使其内径不同的2个极间隔开,这样重复叠片,就组成了一段定子铁心。内径不同的两个极沿轴向间隔开,内径大的极形成了定子的齿,而内径小的极形成了定子的槽,定子齿距为冲片厚度的2倍。动子铁心是由内径相同、外径不同的两组冲片交替间隔放置,外径大的冲片形成了动子的齿,外径心的冲片形成了动子的槽,而齿和槽在圆周方向是连续不间断的。当定子的一对极与动子的位置关系为齿对齿时,那么与定子这对极相垂直的另一对极与动子的位置关系就是齿对槽,若一对极的绕组为A相绕组,则另一对极的绕组就是C相绕组。同理,另一段铁心的两组绕组组成了电机的B相和D相。两段定子铁心之间的距离应满足下式:
如果在上述错片结构反应式直线步进电机的每段铁心上再加上磁钢,同时,保证磁钢的轴向厚度为:h=Kt1,如图3所示,就成为错片结构混合式直线步进电机。
 2.2动作原理[4]
反应式直线步进电机各组绕组的接线如图4a所示,其动作原理是通过使通电相极下的磁导最大而产生运动。
2.2动作原理[4]
反应式直线步进电机各组绕组的接线如图4a所示,其动作原理是通过使通电相极下的磁导最大而产生运动。
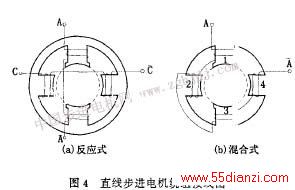 混合式直线步进电机每相绕组的接线如图4b所示。在圆周方向上形成N、S极间隔分布。当A相绕组通以负向电流时,1、3极为N极,2、4极为S极。将电机沿1、3极的轴线剖开,剖面图如图5a所示:磁钢的充磁方向为左边是N极,右边是S极,对于a段永磁励磁与电磁励磁都是N极,磁通增大,在a段定子和动子齿对齿;对于b段正好相反,永磁励磁为S极,而电磁励磁为N极,它们的磁通相互削弱,在b段定子与动子齿对槽。在2、4极剖面图上(图5b),磁钢的充磁方向一样,对于a段永磁励磁为N极,电磁励磁是S极,磁通相互削弱,在a段定子和动子槽对齿,对于b段永磁励磁与电磁励磁都是S极,其磁通增大,在b段定子与动子齿对齿。
混合式直线步进电机每相绕组的接线如图4b所示。在圆周方向上形成N、S极间隔分布。当A相绕组通以负向电流时,1、3极为N极,2、4极为S极。将电机沿1、3极的轴线剖开,剖面图如图5a所示:磁钢的充磁方向为左边是N极,右边是S极,对于a段永磁励磁与电磁励磁都是N极,磁通增大,在a段定子和动子齿对齿;对于b段正好相反,永磁励磁为S极,而电磁励磁为N极,它们的磁通相互削弱,在b段定子与动子齿对槽。在2、4极剖面图上(图5b),磁钢的充磁方向一样,对于a段永磁励磁为N极,电磁励磁是S极,磁通相互削弱,在a段定子和动子槽对齿,对于b段永磁励磁与电磁励磁都是S极,其磁通增大,在b段定子与动子齿对齿。
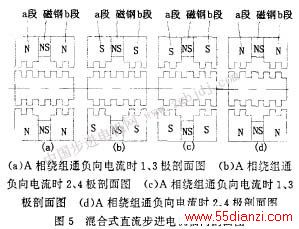 当A相绕组通以正向屯流时,1、3极为S极,2、4极为N极。在1、3极的轴向剖面图(图5c)上,磁钢的充磁方向为左边是N极,右边是S极,对于a段永磁励磁为N极,电磁励磁是S极,磁通相互削弱,在a段定子和动子槽对齿,对于b段永磁励磁与电磁励磁都是S极,它们的磁通增大,在b段定子与动子齿对齿。在2、4极剖面图(图5d)上,磁钢的充磁方向一样,对于a段永磁励磁与电磁励磁都是N极,磁通增大,在a段定子和动子齿对齿,对于b段正好相反,永磁励磁为S极,而电磁励磁为N极,它们的磁通相互削弱,在b段定子与动子齿对槽。这种结构电机的定、动子关系正好满足上面的分析结果。
A相通以正、负电流时,相当定子位置不变时动子的位置关系正好相差半个齿距。B相通电时的情况与A相相同,由于A、B相定子在空间上相差(行+l/4)t,因此当电机从A相通电过渡到B相通电时,动子就向前移动t/4,接着A相再通以正相电流,动子就又向前移动t/4,B相再通以正相电流,动子就又向前移动t/4,A相再通以负相电流,动子就又向前移动t/4,又回到了第一种通电状态的情况,这样当电机绕组按照灭、百、A、B通电时就形成了动子的连续运动,若要反向运动,只需改变定子绕组的通电顺序。
3解析分析
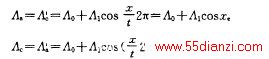
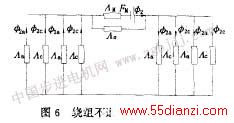
根据混合式直线步进电机的结构可以画出一相等值磁路图如图6所示[5],图中以。和A分别对应1、3极和2、4极下的主磁导,取1极下齿对齿时为xc=0,在不计铁心饱和的影响并忽略主磁导中高次谐波的影响时,可得:
当A相绕组通以正向屯流时,1、3极为S极,2、4极为N极。在1、3极的轴向剖面图(图5c)上,磁钢的充磁方向为左边是N极,右边是S极,对于a段永磁励磁为N极,电磁励磁是S极,磁通相互削弱,在a段定子和动子槽对齿,对于b段永磁励磁与电磁励磁都是S极,它们的磁通增大,在b段定子与动子齿对齿。在2、4极剖面图(图5d)上,磁钢的充磁方向一样,对于a段永磁励磁与电磁励磁都是N极,磁通增大,在a段定子和动子齿对齿,对于b段正好相反,永磁励磁为S极,而电磁励磁为N极,它们的磁通相互削弱,在b段定子与动子齿对槽。这种结构电机的定、动子关系正好满足上面的分析结果。
A相通以正、负电流时,相当定子位置不变时动子的位置关系正好相差半个齿距。B相通电时的情况与A相相同,由于A、B相定子在空间上相差(行+l/4)t,因此当电机从A相通电过渡到B相通电时,动子就向前移动t/4,接着A相再通以正相电流,动子就又向前移动t/4,B相再通以正相电流,动子就又向前移动t/4,A相再通以负相电流,动子就又向前移动t/4,又回到了第一种通电状态的情况,这样当电机绕组按照灭、百、A、B通电时就形成了动子的连续运动,若要反向运动,只需改变定子绕组的通电顺序。
3解析分析
根据混合式直线步进电机的结构可以画出一相等值磁路图如图6所示[5],图中以。和A分别对应1、3极和2、4极下的主磁导,取1极下齿对齿时为xc=0,在不计铁心饱和的影响并忽略主磁导中高次谐波的影响时,可得:
 外部磁路的主磁导为:
外部磁路的主磁导为:
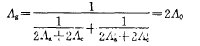 总磁导为:
总磁导为:
 由于总磁导AE基本不变,所以工作点与总磁通及转子的位置无关,但各个极下的磁通与转子的位置有关,即
由于总磁导AE基本不变,所以工作点与总磁通及转子的位置无关,但各个极下的磁通与转子的位置有关,即
 当电机一相绕组通屯时,等值磁路如图7所示,在图中让含有磁钢的支路开路,来确定等值去磁磁势或增磁磁势。根据基尔霍夫磁路定律列出节点a、b的磁位方程[6]:
当电机一相绕组通屯时,等值磁路如图7所示,在图中让含有磁钢的支路开路,来确定等值去磁磁势或增磁磁势。根据基尔霍夫磁路定律列出节点a、b的磁位方程[6]:
 可以得到:
可以得到:
 当电机一相绕组通电,xc从士π到0之间变化时,定子磁势在动子回路内产生的互磁通的变化,与磁通增量相对应的动子回路磁共能的增量为:
当电机一相绕组通电,xc从士π到0之间变化时,定子磁势在动子回路内产生的互磁通的变化,与磁通增量相对应的动子回路磁共能的增量为:
 与之相对应的定子磁路磁共能增量为:
与之相对应的定子磁路磁共能增量为:
 电机内部磁共能的增量为:
电机内部磁共能的增量为:
 则静拉力为:
则静拉力为:
 进一步可以得到:
进一步可以得到:

本文关键字:步进电机 驱动电路及控制电路,单元电路 - 驱动电路及控制电路






