ǰ ��
���ߴ���������(Wireless Sensor Network,WSN)�����ɲ������ض���������ڴ����������ʹ������ڵ���ɣ�ͨ������ͨ�ŷ�ʽ�γɵ�һ����������֯����ϵͳ������Ϊһ��ȫ�µ���Ϣ��ȡ�ʹ�����������Ŀ����١�������⡢����Ӧ�á�ҽ���������ռ�̽�����������Ź㷺��Ӧ�ã��ڵ㶨λ���������ߴ�����Ӧ�õĻ��������õĽڵ㶨λ�������ǻ���RSSI�ģ��ڵ�֮��ͨ�����յ���RSSI ֵ�����þ��鹫ʽת��Ϊ���룬��ͨ���ʵ����㷨������ڵ�����λ�á�Ȼ�������ڻ������������ڶྶ��ɢ�䡢�ϰ����Ÿ��ŵȲ��ȶ����أ�ʹ��RSSIֵ���ȶ������нϴ�IJ����ԡ�ʵ��ʹ���У���Ҫ�Բ�õĶ��RSSIֵ�����˲��Ż��������õ��Ż����RSSIֵ���ٽ��ж�λ���㡣����ֱ���ܼ��ֳ��õ�RSSI�˲�������
1 RSSI �˲�����
1.1 ��ֵ�˲�
��ֵ�˲���ָ�ڵ���յ���һ�ڵ�Ķ��RSSIֵ֮��������ʽƽ��ֵ����Ϊ���Խ������ʽ(1)��ʾ��

�÷�������ʵ�֡������������ܴ�RSSI������Χ��Сʱ���ź�ƽ���Ƚϸߣ��ɽϺõؽ��RSSI��������;��RSSIֵ�����ϴ�ʱ���÷������Ŷ��½���
1.2 ����ƽ���˲�
����ƽ���˲��ǰ��������յ���N ��RSSIֵ����һ�����У����еij��ȹ̶�ΪN,ÿ�ν��յ�һ���µ�RSSIֵ������β�����ӵ�ԭ������һ��RSSIֵ�����Ѷ����е�N �����ݽ�������ƽ�����㣬�Ϳɻ���µ��˲���������˲��㷨�ŵ��Ƕ������Ը��������õ��������ã�ƽ���ȸߣ�ȱ���Ƕ�żȻ���ֵ������Ը����������ò�������������������������IJ���ֵƫ���������������űȽ�ǿ�ij��ϡ�
1.3 ��λֵ�˲�
��λֵ�˲���ָ�ɼ�N(N Ϊ����)��RSSIֵ֮����N ��RSSIֵ����С˳�����У�ȡ�����м��RSSIֵ��Ϊ�˲��������ʽ(2)��ʾ��
��λֵ�˲�����Ч�˷���żȻ��������IJ������ţ����Ƕ���������űȽ�ǿ�������������������£��˲�Ч�������롣
1.4 �ҿ�ѷ���鷨�˲�
�ҿ�ѷ���鷨�˲���ͨ��������ж������쳣���ݡ��÷�����Ϊ�쳣����Ӧ����������ݺ���С���ݣ���˸÷����ǽ����ݰ���С���У�����������ݺ���С�����Ƿ����쳣���ݡ�����������С�ڵ���30Ϊ�������岽�����£�
(1)����ͬһ�ڵ��β�������RSSI ֵ����С�����˳�����У�{RSSI(1)��RSSI(2)��RSSI(3)��-,RSSI(n - 2)��RSSI(n - 1)��RSSI(n)} ,��ȷ�����ˮƽ α =0.05;(2)���ݵҿ�ѷͳ�ƹ�ʽ[10]�У�
��n=3~7ʱ����߶��쳣ֵ��
(3)���ݼ��ˮƽα ,��ҿ�ѷ������ٽ�ֵ�����ڵҿ�ѷ���鷨���ٽ�ֵ���в����Ӧα ,n ���ٽ�ֵD(α��n) .
(4)��rij �� rij- ,��rij �� D(α��n) ʱ��RSSI(n) Ϊ�쳣ֵ;��rij- �� rij ,��rij- �� D(α��n) ʱ��RSSI(1) Ϊ�쳣ֵ;�����ж�δ�����쳣ֵ��
(5)ȥ���쳣ֵ��ʣ�µ��������ݣ��ظ�ִ�в���(1)~����(5)��ֱ�����ټ���쳣ֵΪֹ�����ʣ�µ����ݿ���������ƽ��ֵ��Ϊ����˲������
�ҿ�ѷ���鷨�ܹ���Ч��ȥ�������е��쳣ֵ������Ҫ�����ͨ�����������˲��㷨����˲���
1.5 ��˹�˲�
��ͬһ���ڵ���յ��Ķ��RSSIֵ�У����ڸ��ָ��ţ���Ȼ��������������С�����¼���ͨ����˹ģ��ѡȡ�߸��ʷ�������RSSIֵ��Ϊ��Чֵ�������伸��ƽ��ֵ�����ַ����ܹ���Ч�ؼ���С���ʡ�����Ŷ�����������ݵ�Ӱ�죬��߶�λ��ȷ�ԡ�
��˹ģ�ͽ����RSSI��ʵ�ʲ��������ܸ��š��ȶ��Բ�����⣬����˶�λ���ȣ�������ӰЧӦ����������ȳ�ʱ����������Ч��Ƿ�ѡ�
1.6 �ٶȳ����˲�
����������һ����Χ�ڵ��ƶ�����������ģ���ǰλ�ú�ǰһʱ�̵�λ�ô���һ�����ϵ��˼�룬�����ٶȳ�����ʹ�ƶ��㱣�������˶����㷨�������£�
����ֵ��
Ԥ��ֵ��

ʽ�У� Rprev(i) Ϊi ʱ���ź�ǿ�ȵIJ���ֵ;Rpred(i) Ϊi ʱ���ź�ǿ�ȵ�Ԥ��ֵ;Rest(i) Ϊi ʱ���ź�ǿ���˲�ֵ;Vest(i)Ϊi ʱ���ź�ǿ�ȱ仯�ʵ��˲�ֵ;Vpred(i) Ϊi ʱ���ź�ǿ�ȱ仯�ʵ�Ԥ��ֵ;a,b Ϊ���泣��;TS Ϊ����ʱ�����������ٶȳ������˲��㷨�ܹ���Ч�ؼ�С�źŲ���������������Ӱ�졣
1.7 �������˲�
�������˲��Ļ���˼���ǣ�����С�������Ϊ��ѹ��������ź���������״̬�ռ�ģ�ͣ�����ǰһʱ�̵Ĺ���ֵ�͵�ǰʱ�̵Ĺ۲�ֵ�����¶�״̬�����Ĺ��ƣ������ǰʱ�̵Ĺ���ֵ���㷨���ݽ�����ϵͳ���̺۲ⷽ�̶���Ҫ�������ź�����������С�������Ĺ��ơ�
RSSI��xk ��ʾ���������̵���ѧģ�Ϳ��Ա�ʾΪһ����˹����������������һ���Ե��ƹ��̣���״̬���̺۲ⷽ�̿ɱ�ʾΪ��
״̬���̣�
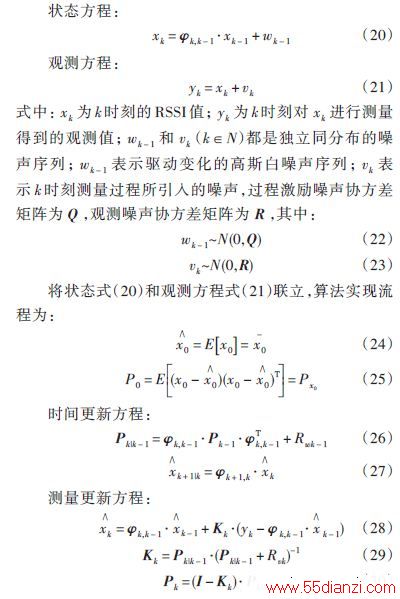
�������˲�����һ���̶���������������������ɵ�RSSI�۲�ֵƫ�룬�����������㷨�������RSSIֵ���ȶ��Ը��á���������Ŀ����ٷ���Ҳ��ȡ�úܺõ�Ч����
2 ����
���������˼��ֳ��õ�RSSI�˲�����������ԭ���������㷨���и��Ե��ص㣬û����һ���Ǿ������ŵģ������ֵ�˲������㷨����ʵ�֣����Ǿ��Ȳ��ߣ�����Ч�����ѣ�����˹�˲�����Ч�����˺ܶ࣬����ʵ��������ø���һЩ���ڵ����ĸ����ܺģ�ͬʱռ���˸����ڴ�ռ䡣ʵ��Ӧ����Ҫ���ݾ���������������������ѡ����ʵ��˲�������Ҳ�ɶ����㷨���ʹ�ã��Դﵽ��ѵ��˲�Ч����ϣ�������ܹ�Ϊ���ߴ����������д���RSSIֵ������о����ṩһЩ�ο��ͽ����






