5 复合控制方法
UPS逆变器采用重复控制技术,在线性和非线性负载下均可以获得良好的静态特性,但是由于重复控制延时1个工频周期的控制特点,使得单独使用重复控制的UPS逆变器动态特性极差,基本上无法满足UPS逆变器的各项指标,因此本文提出了双环PI控制和重复控制相结合的复合控制方法。图4是这种复合控制方法的结构框图。图中左上角虚线框内的控制器为离散重复控制器,主要用来消除输出电压周期性的跟踪误差,减小UPS逆变器在整流桥负载下的输出电压畸变。双环PI控制器主要是对输出电压跟踪误差进行实时的控制,减小不确定的干扰造成的输出电压畸变。
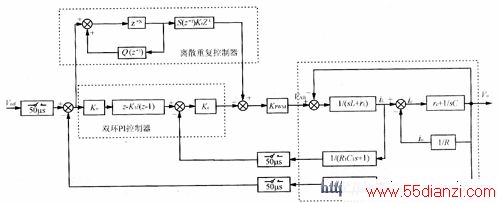
图4 双环PI和重复控制的复合控制框图
上述复合控制的结构实际上是一种并联的结构,重复控制器的输入为电压误差信号,输出为电压控制信号;双环PI控制器的输入为电压误差信号和电感电流信号,双环控制器的输出和重复控制器的输出相加之后再输入比较器,产生逆变桥的门极脉冲。两种控制方法的结合,一方面,当系统处在稳态时,重复控制器起主要的调节作用,使得稳态下输出电压能很好地跟踪参考正弦波。另一方面,当系统出现比较大的瞬态干扰时,双环PI控制会起到比较大的作用,调节输出电压,使跟踪误差迅速减小。
图5为MATLAB的SIMULINK工具箱下的仿真结果,图5(a)为双环控制,图5(b)复合控制。可以很明显得看到,采用复合控制的UPS逆变器的输出波形的畸变已经变得很小。
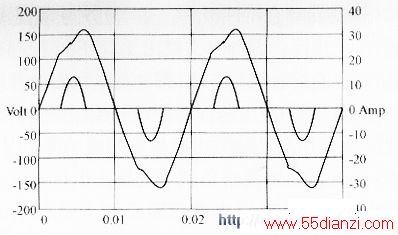
(a)双环控制
www.55dianzi.com
图5整流桥负载下的电压电流仿真波形
图6为整流器负载下的电压电流实验波形比较,用LEM公司的钳表测得,图6(a)中的电压THD=8.2%,图6(b)中的电压THD=4.2%,采用复合控制的UPS逆变器的输出波形畸变有明显的减小。
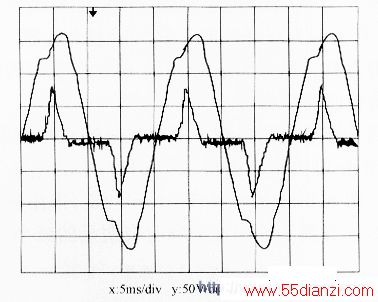
(a)双环控制
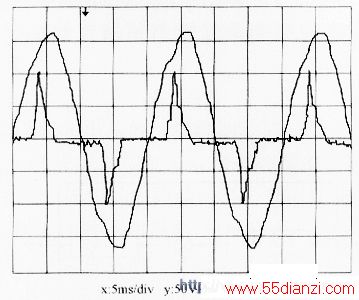
(b)复合控制
图6整流桥负载下的电压电流实验波形
6 结语
介绍了重复控制的原理和设计方法,提出了一种双环PI控制和重复控制相结合的复合控制方
法。仿真和实验结果验证了复合控制方法的优越性。
本文关键字:逆变器 稳压-电源电路,单元电路 - 稳压-电源电路






