1 ǰ ��
�ɴ�������֫�����������Ǹ����Ϳ��������˵�һ�֣���һ�ְ���������չ��֫�˶�����������װ�ã������ԭ�����ڻ��������˶���Ϊ��ʶ��Ϣ�Ļ����ϣ��ɰ�װ���Ȳ��ؽ�(�Źؽڼ�ϥ�ؽ�)�����ŷ���������ؽ��˶���ͨ�����ؽڽǶȡ��ٶ�ֵ�ĸı����ﵽ�������Ȳ���Э���˶����ṩ�������������ڸ��ػ�ʱ����������µ��˶�ǿ�ȣ�����Щ�������˶���Ϊ�����ṩ���ƺͽ��Σ������������һ��Э���������������塣Ŀǰ�������ϴ�Լ��10���ʵ���Ҵ��¿ɴ������������������˵��о��������ձ�����������ǰ�У�������δ����ر������ձ�������ѧ(Tsukuba University)��2002�����ƿ����˻�����װ���������(hyhrid assis-tive limb��HAL)����е������������ȵ����࣬���������Ȳ�Ƥ���ϵ�EMG��������⼡��ĵ��������Ƶ綯����������е������˶��Ը����Ȳ��Ķ������������ݴ�ѧ��������У�����˺����幤��ʵ�������Ƴ�����“��������֫�����”(Berkeley lower extrEMIty exoskeleton�� BLE-EX)���ɱ���ʽ��ܡ������ȼ���Ӧ��Һѹ�����豸��ɣ���еϵͳ�������������νṹ���Ƶ���ƣ�����ʽ����ܹ�ʹ������Я��һ���غɣ�����Ч�����������������߶�ֱ�Ӿ���������������档��֫������ܹ�Я���ⲿ���غ�����������(���������ߵ�����)�����·��Զ�������ߣ���ʹ����ȫ����װ��ʿ����ǿ��������������о��ٶȡ�Ȼ������װ�ô����Ź�ͬ��ȱ�㣬���ڼ��紫�����Ǹ��ݼ���ʱƤ�����洫�͵��������źŻ������Ӳ�̶����ƶ��˵���Ϊ��ʶ�����������õĴִ�����Ҫ�����弡��ֱ�ӽӴ���ճ���ڼ����ϣ���Ҫ�ر�Ĺ̶�װ�ã�����ֱ�ӵ��´����ϵIJ���;������ڵĺ�Һ����������װ�ĺû��Ƚ�Ӱ������ȡ��Ϣ���ȶ���ȷ�ԣ�������Ϣ��������ӣ����ܸ��ţ��Ӷ�ʹ�����ѶȼӴ���ˣ��������һ�����͵Ŀɴ�������֫���������˸�֪ϵͳ����ϵͳ���ڻ�ȡ������֫�ͻ����������֮��ĽӴ�����������Щ����Ϣ�ؽڽǶ���Ϣ���ƻ������������ʵ�ֶ�������֫�˶���������
2 ����������ϵͳ
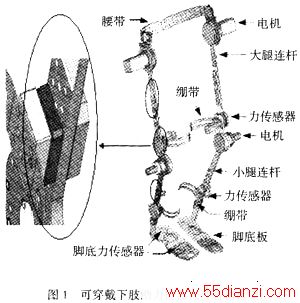
�ɴ�������֫������������Ҫ�ɻ�е�����кͿ���������ɡ���������Ǽܰ���12�����ɶȣ�ÿֻ����6�����ɶȣ��Źؽڰ���3�����ɶȣ�ϥ�ؽڡ��ؽںͽŵ�����1�����ɶȣ������Ҫ���������������˻����������������Ҫ���ִﵽ�������Ȳ��˶���Э�������������˶���������Ҫ����ͼ1��ʾ��
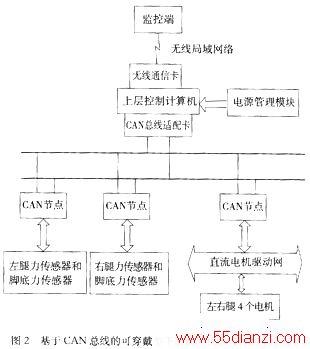
ִ�в�����Ҫֱָ���ŷ��������ϵͳ��Ҫ4�������Ƿֱ�̶��������Źؽں�ϥ�ؽ��ϡ��ɴ�������֫���������˿���ϵͳ��Ҫ����PC104Ƕ��ʽ����ϵͳ���PC104CAN��������ϵͳ�Ŀ��ƽṹ��ͼ2��
3 �����˸�֪ģ��
3.1 �˻�ϵͳ�Ӵ���Ϣ
�ɴ�������֫������������Ҫ����������֫�˶���Ϣ�ṩ��������Щ�˶���Ϣ��Ҫ��������������������˵��Ȳ��Ӵ����źš��ŵ����źţ�ϥ�ؽں��ؽڵĽǶ��źŵȡ�Ϊ�˻�ȡ��Щ�˶���Ϣ�����һ����CAN���ߵĶഫ������֪ϵͳ������˴�ͳ�Ĵ�����ͨ�ŷ�ʽ(��Ҫ��ָRS-232��RS-485)�����ڵ㵥һ��ʵʱ�Բ�����⡣��ϵͳ�ɵ�����̡���װ���Ȳ���2����ά���������Ͱ�װ�ڽŵ�6��һά����������ɡ��Ȳ����������̶�������ϥ�ؽں��ؽ��ϲ������ڲ��������������֮��ĽӴ���;�ŵ�����������װ�ڽż�ͽŸ������ڲ������淴��;����������ڲ����Źؽں�ϥ�ؽ�ת���Ƕȣ���ͼ1��ʾ��
3.2 ϵͳ���
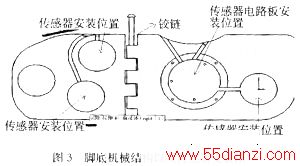
�Ȳ���ά�������������ڲ��������������������֮��ĽӴ�����С�Ĵ��������������ȷ�Ժ��ȶ��Զ����������˵Ŀ�������Ҫ�����塣�Ȳ�����������Ҫ����2����ά����������ɣ����ڲ��������С��������������֮��ĽӴ������ýӴ��������������Ȳ�����(X����)�ʹ�ֱ�Ȳ�����(Y����)������֫���������˵Ŀ����У�����Ҫ֪�������Ȳ�������˵�������֮�⣬����Ҫ֪������ŵԻ����˵������������Ų����������Dz���������˻�ϵͳ�����÷�����������ŶԵ�������������������֧�ŵ��ʾ��������֧�ŵ��λ�÷ֱ�λ�ڵ�һ�ŹǸ����͵����ŹǸ����Լ���Ÿ������忿�������������㹭֧�����壬��������������������㴫�ݵ����档Ϊ��ȷ��ȡ����ʱ�ŵ�����Ϣ���ŵ����������İ�װλ�þͶ����������λ���ϣ�ÿֻ����Ҫ��װ3��һά��������������Ҫ6��һά�������������尲װλ�ü�ͼ3�����ڽŵ�е���ֵ����ƣ�����������������Ƚ�С���䱾���е�ߴ�φ40 mm(ֱ��)×8 mm(���)������Ϊ1000 N��
3.3 ���������
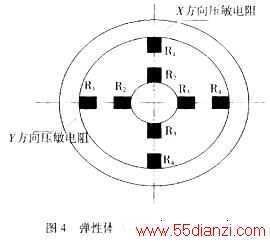
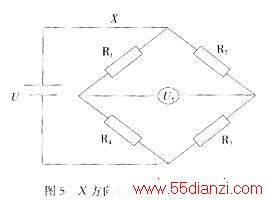
�����������Ƕ�ά����������еĹؼ�����������������Ԫ���������Դ�����������ľ�̬�Ͷ�̬���Է�������Ļ����ϣ����һ�ֻ���E��ĤƬ�ĵ�����ṹ�����ֽṹ�Ĵ��������нṹ�������ȸߡ�ά�����С�����ױ궨���ص㡣������������Ҫ�ɵ���ĤƬ��Ӧ��ƺ�����ת��������������ɣ�������������E��ĤƬ���ɣ�ʵ��X��Y��������Ӧ�����IJ���������ĤƬΪԲ�νṹ����ֱ���ͺ�ȷֱ�Ϊφ15 mm��2 mm����ȷ���Ͳ�������һ�¡�����Ԫ�����ò�ʽ����Ӧ��Ƭ��Ӧ��Ƭճ����E��ĤƬ�ϡ��������������E��ĤƬ��Ӧ����Ӧ���IJ�����ʽ�ܶ࣬���о����ò�ʽ����Ӧ��Ƭ��Ӧ��Ƭճ����E��ĤƬ�ϣ����ڲ�����������Ӧ���Ĵ�С��Ӧ�����Ƭλ����ͼ4��ʾ��X��Y����Ӧ��Ƭ��װ��E��ĤƬ���¶ˣ���ƬӦ��Ƭ�������һ����˹��ȫ�ŵ�·(��ͼ5��ʾ)��ʵ������źŵ��Զ�������������ڴ�����ʱ����������С������IJ�ͬ��������������е����ܵ���Ӧ����ͬ���Ӷ��õ�����Ӧ��֮��Ĺ�ϵ����X����Ϊ����E��ĤƬ���е��Բ��ֵ�Բ��ƽĤƬ���ڱ���ṹ����X�����������£��߽������Ƚϼ����Ե�ЧΪ��Բ�̶ܹ�������Ӧ��������Ӳ���ĵ�Բ�α��塣���ݱ������ۿ�֪���ܱ߹�֧����Ӳ���ĵ�ĤƬ�ڰ뾶r���ľ���Ӧ��&epSILon;r������Ӧ��εθΪ
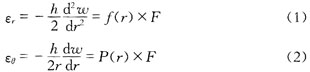
ʽ�У�ω��h�ֱ�ΪԲ��ĤƬ�ķ���λ�ƺͺ��;FΪʩ�����ĵ�Ч������;f(r)��P(r)�ǽ���r�йصĺ�����
����ʽ���Կ��������뾶rһ����Ҳ����ѹ������λ�ù̶�ʱ��Բ��ĤƬ�����ϵ�Ӧ��&epSILon;Ϊ
ε=kFF (3)
ʽ��kFΪӦ��ϵ��������
����ʹ�õȱ۵��ţ���R1=R2=R3=R4����
ʽ�У�ε1��ε2��ε3��ε4�ֱ���4�����е���R1��R2��R3��R4��Ӧ��;εΪԲ��ĤƬ����Ӧ��;G��kΪ����;UX����·�����ѹ��
�ۺ�ʽ(4)��(5)����·�������ѹ�ź������ڴ����������źţ����������ѹ�źžͿ��Եõ�����Ŀ������źš�
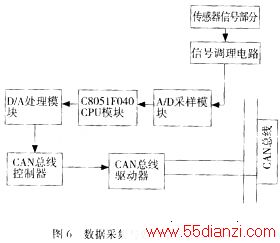
������Ӳ����·����Ƕ��ʽƬ��ϵͳ�������ֵ�·��ģ���·��������ɣ�����ģ���·���źŵ����·������Ŵ��·��ģ���˲���·���;���ֵ�·������Ҫ����A/D����ģ�顢���ּ���ģ�顢CAN���߿�������CAN�����������ͱ�Ҫ����Χ��·ģ�顣ͼ6����������������֪ϵͳ�����ݲɼ��봦��ϵͳ��Ӳ����·ԭ����ͼ��
���Ĺؼ��֣������� ������-���ܳ�������֪ʶ���� - ������-���ܳ�






