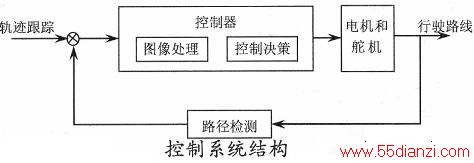
����1������ϵͳ�ķ���
�������ܳ���һ���ϸ��ӵġ���ģ����ۺ�ϵͳ���ӿ��ƵĽǶ���˵������ϵͳ���Է�Ϊ������������������ִ�л����������֣�����ͼ��ʾ��
����2���ܵ���ʾ�ߵ�ʶ��
����ʹ���˶����ص��ݶȽ��м�⣬�Ӷ���ȡͼ���Ե��
����(1)�ݶȼ����ͼ�����е�Ӧ��
�������ǵ���ɨ�账�������к�ɫ��ʾ�߶����������ɨ�跽��ֱ����˲����ݶȼ��ķ�������ͼ��Ԫ�ص��ˮƽ�ݶȽ��м�⣬���趨һ����ֵ����ͬһ�����ݶȴ��ڴ˷�ֵ�Ķ���������λ����Ϊ���к��ߵ�λ�á���������ͼ���ݶ������Ϊ������㣬�þ��Բ�ַ����Ƶı���ʽΪ��|��f(x��y)|=(2)![]()
��־����������������
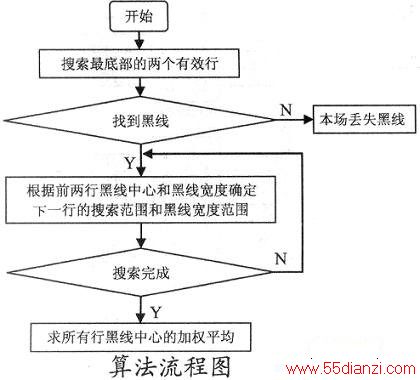
��������ÿһ��ͼ���ʱ���Ѿ����������ڱ��к���λ�õĹ��ơ�����ͨ�����������Ƽ�Ȩ�͵ķ�ʽ��Ϊ���к���λ�õĹ��ơ��㷨��ȡ�ռ���Ƶļ�ȨΪα��![]()
����S(k)Ϊ��k����λ�õĹ��ƣ�SP(k)Ϊ�ռ���ƣ�����ֵ����P(k-l)��ǰһ�к��ߵ�λ�á�St(k)Ϊʱ����ƣ�����ֵ����ǰһ֡ͼ���к��ߵ�λ�á���oc��β�ĺ�Ϊ1���㷨�ij�������ͼ����ͼ��ʾ��
����3��ͼ������У��
������������ͷǰ�ӽǶȵ�ԭ��ϵͳ�õ���ͼ��ʵ������һ�����ε���������ͷ����ͶӰ�����Σ�ͼ��������䡣��ˣ�Ϊȷ�����Ƶľ�ȷ�ԣ������ͼ����л���У����
����4���µ���ʶ�������㷨
�����ڱ�����У�Ϊ�˲��������Եij���x��Y��Z����ļ��ٶȱ仯��MMA7260�����̱���Ϊ1.5G��
�������ת����ٶȵ��ڵ�PID�����㷨���
����1���ٶȵĿ���
�������ٶȵĿ��Ʋ���������ʽPID�㷨�����ٶȿ����в�ȡ�Ļ���������������٣�ֱ�����٣���ʵ�ʲ����У�����С��ֱ������������ʱ�Ӽ��ٱȽ�����������ת�������ϽϺá�
����2������Ŀ���
�����Զ���Ŀ��Ʋ�����λ��ʽPID�㷨����ͼ���㷨������õ��ĺ���λ�úͶ�Ӧ�Ķ��PID���սǶȴ�����һ�����Թ�ϵ��ͨ���������Ч�����á�
���Ĺؼ��֣����� ���� ��� ����ͷ ������-���ܳ�������֪ʶ���� - ������-���ܳ�






