目前,市场上虽然出现了一些爬壁机器人,但至今还没有一种专门针对玻窗清洁的机器人。本文介绍了一种基于负压吸附的轮式玻窗清洁机器人,将其用于高层住宅的的玻璃清洗工作。使用该机器人可以避免玻窗清洁带来的高空作业危险,而且其操作简单、使用方便,应用价值高,市场前景广阔。
1 玻窗清洁机器人系统总体结构
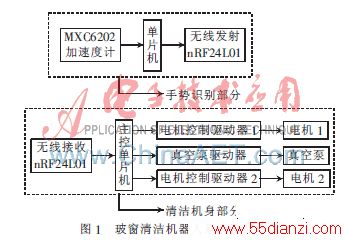
该玻窗清洁机器人系统由手势识别和清洁机身两个部分组成,如图1所示。手势识别部分利用MXC6202二轴加速度传感器测量人手控制过程中的加速度值,将采集到的加速度值送入单片机中处理,经过一定的算法得到控制信号,并通过无线发射模块发送到清洁机器人部分。清洁机身部分将接收到的手势识别控制信号传送给主控单片机[1],经过运算处理后,产生两路直流减速电机的控制信号和一路微型真空泵的控制信号,经各驱动器放大后,实现对直流减速电机和微型真空泵的驱动和控制。
2 玻窗清洁机器人结构
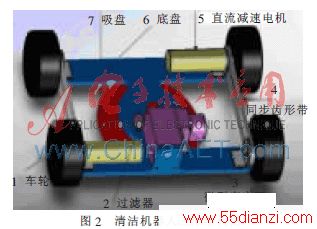
玻窗清洁机器人采用负压吸附、轮式驱动结构[2-3]。工作时,机器人吸附在玻璃面上,通过全方位移动,实现对玻璃的清洁。清洁机器人结构的三维实体模型如图2所示,由车轮、过滤器、微型真空泵、同步齿形带、直流减速电机、底盘、吸盘七部分构成。该结构系统简单、可靠、操作方便,可以满足壁面移动机器人在负载能力、速度以及可靠性方面的要求。