本文介绍的搜寻机器人能够实现在远程控制下,使机器人在给定的地图范围内自动搜寻障碍物、跟踪特定目标。探测人体和跟踪路线等功能。系统的主要算法有单目测距算法、单目测角度算法、图像分割算法、路径规划算法、路径跟踪算法、语音识别与合成算法等。整个机器人系统按结构分为核心控制单元,辅助控制单元,视觉系统,听觉系统,运动系统,红外传感系统.无线网络系统.锂离子供电系统。定位系统。
一、功能
1.搜寻障碍物(路径规划)
通过无线方式输入全局地图,机器人根据栅格化的全局地图以及本身定位系统达到指定的目的地。在移动过程中利用视觉实时探测未知障碍物的位置并在地图中标出并根据障碍物的位置实时规划出达到目的地的最短路径,确保能在搜寻障碍物位置并躲避障碍物的前提下达到目的地。
2.运动物体跟踪
搜寻机器人首先通过学习获得被跟踪目标的色彩直方图,然后利用视觉在栅格化的全局地图内寻找目标并进行目标跟踪。
3.语音控制及人机交互
搜寻机器人通过听觉系统识别语音命令以及简单的逻辑语法内容,从而实现语音控制及人机交互。
4.远程控制
用户通过远程终端控制机器人的运动。控制按钮分为粗调控制和微调控制两类。粗调控制按钮分为前进、后退、左转、右转、停止。微调控制可以人工的输入前进后退的距离以及左转右转的角度。
5.视频监控
搜寻机器人自带两个摄像头,一个用于实时监测周围情况以及跟踪运动目标,另外一个高精度的工业摄像头可以改变图像参数。主要用于图像分析及处理。
6.单目测距及角度
利用几何关系和摄像机成像模型得到的路面坐标系和图像坐标系之间的关系。实现单目视觉测量机器人与前方目标物体之间的距离及角度。
7.地震搜救(人体检测)
利用热释电红外传感器检测机器人周围的人体。利用声音采集系统检测周围声音。利用视频监控系统获得周围情况。
二、系统设计
1.嵌入之星
这是整个系统的核心组成部分,下表是这个系统对它的硬件资源利用情况的统计。从表中可以看出。该系统充分开发了嵌入之星的串口和LJSB资源,因为目前大部分外部设备都有这两种接口,而且这两种接口使用起来也比较方便。
2.EasyARM8962
ARM8962扩展板的作用主要是为系统提供用于控制外部执行机构或其他设备的可编程GPIO、PWM控制信号以及ADC等资源。ARM8962扩展板通过串口和嵌入之星相连,利用自己编写的串口通信指令格式,实现嵌入之星对ARM8962的控制。以及它们之间的数据交换。
3.便携式ATX电源板
便携式AT×电源板的作用是把锂离子电池输出的电压转换成嵌入之星正常工作需要的各种不同的电压,以及为系统的其他设备(如多媒体音响、声音采集系统等)提供电源。从而使系统的供电系统由轻便的电池代替了笨重的AT×电源。
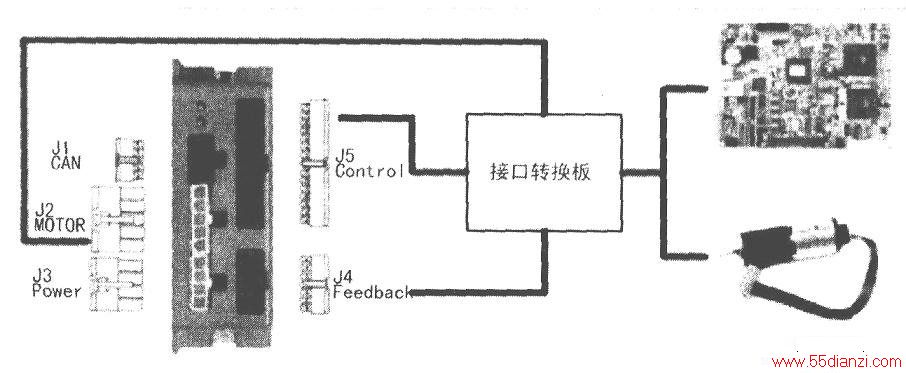
4.电机驱动器
通过电机驱动器可以非常方便地使用不同的模式控制电机。一个电机驱动器对应一个电机(连接电机以及电机的反馈)。并通过串口和嵌入之星相连,下图是电机驱动器的接线图,由于驱动器的接口和嵌入之星、电机反馈信号接口不兼容。因此必须通过一个接口转换板和嵌入之星、电机反馈信号相连。正确连接驱动器之后,在使用之前还必须在嵌入之星上安装并运行和驱动器配套的软件并根据电机的一些参数对驱动器进行设置。
5.直流有刷电机
在多功能机器人中使用的电机是Maxotl的RE一35系列直流有刷电机,该电机后端带有编码器反馈系统构成直流伺服,能实时返回电机的转动速度等参量。
6.热释电红外传感器
热释电红外传感器是一种能检测人或动物发射的红外线而输出电信号的传感器。目前正被广泛的应用到各种自动化控制装置中(如楼道自动开关、防盗报警、房间无人时会自动停机的空调机或饮水机、能判断无人观看或观众已经睡觉后自动关机的电视机、开启监视器、自动门铃、结合摄影机或数码照相机自动记录动物或人的活动等)。
7.工业摄像头
工业摄像头可以分为工业相机和工业镜头两个部分,在系统中主要用于机器视觉图像的采集。系统中使用的工业相机是高清晰彩色工业相机,它有130万像素高分辨率CMOS彩色图像传感器。并提供丰富的实时图像接口控制,广泛应用于计算机图像采集、人像及人体生物特征采集、模式识别、工业检测、医学显微图像以及交通管理和机器视觉等领域,其具体参数见上表;系统中使用的工业镜头是百万像素定焦镜头,下表是该镜头具体参数。
8.视频摄像头
视频摄像头的作用是实时视频图像的采集,以保持在笔记本终端能看到较流畅的视频。
9.USB无线网卡
USB无线网卡能实现在笔记本终端远程登陆多功能机器人系统。并通过控制面板操作多功能机器人或实现多动能机器人的远程编程。
10.声音采集系统
声音采集系统采用Apple公司的话筒,该话筒带有独立的放大电路,可以把距离在2~6m的细小声音采集下来。使用时不需要驱动,只需把MIC插头插到嵌入之星的MIC口,然后再把LJSB头插到任意的LJSB口(给话筒内部放大器供电)。使用时需要注意:
。麦克风音量调成静音;。麦克风加强是否选上视实际情况而定(选上能采集很远的声音)。
11.电子罗盘
电子罗盘也叫数字罗盘,一般用磁阻传感器和磁通门加工而成的,是利用地磁场来定北极的一种方法。其信号精度不受地形、地物遮挡影响。适应能力较强。电子罗盘可以分为平面电子罗盘和三维电子罗盘,平面电子罗盘在使用时必须保持罗盘水平,否则当罗盘发生倾斜时,也会给出航向的变化而实际上航向并没有变化。三维电子罗盘克服平面电子罗盘在使用中的严格限制,三维电子罗盘在其内部加入了倾角传感器,当罗盘发生倾斜时可以对罗盘进行倾斜补偿。这样即使罗盘发生倾斜,航向数据依然准确无误。多功能机器人上使用的是平面电子罗盘,其内置微处理器计算传感器与磁北夹角,使用时只需给它供上电(DC5V),并用嵌入之星的串口和它相连,就能从串口读取传感器与磁北的夹角,能精确到O.1。
需要注意的是电子罗盘的原理是测量地球磁场,如果在使用的环境中有除了有地球以外的磁场且这些磁场无法有效的屏蔽时,那么电子罗盘的使用就有很大的问题,这时只能考虑使用陀螺来测定航向。
12.锂离子电池
整个系统是由两块锂离子电池进行供电的,一块专门给电机驱动器和电机提供动力,另外一块给ATx电源板提供动力并通过AT×电源板转换成不同的电压为系统中各种设备(除电机驱动器和电机)提供动力。每块锂离子电池由7节4.2V/2,200mAh的锂离子电池组成。
三、硬件和软件结构
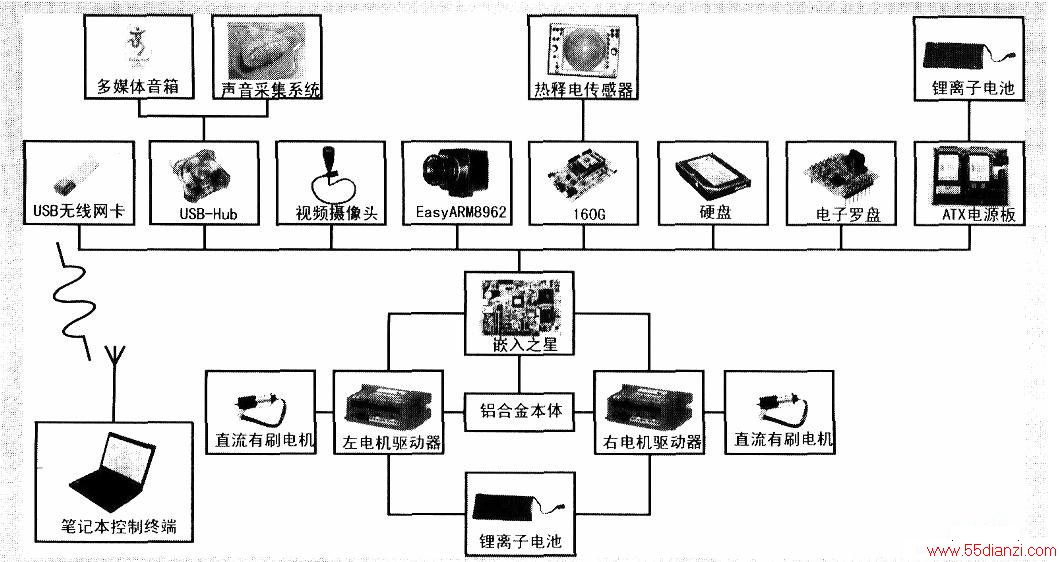
上图是系统的硬件结构示意图。
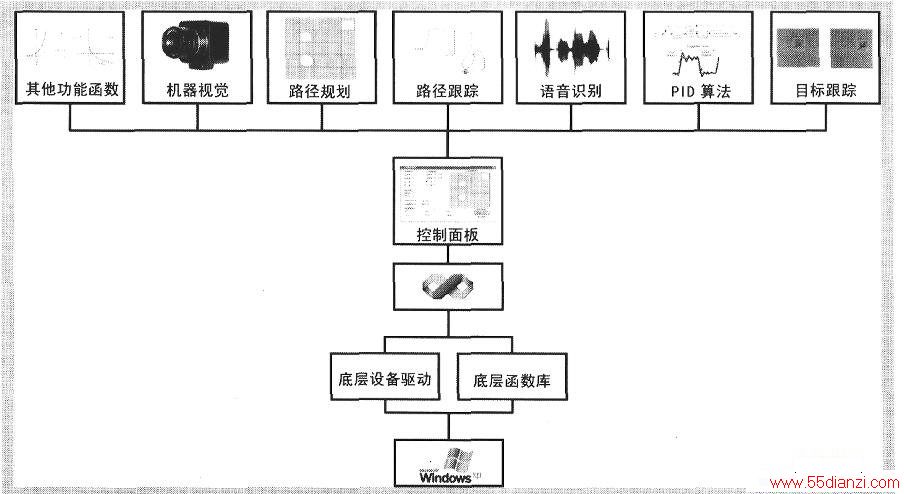
该系统的软件组成如下图所示。所有的软件开发都是在WindowsXP操作系统上完成,主要的软件开发平台是微软的VisiualStuido2005,,开发语言以VC++为主,远程控制界面使用到MFC等相关资源。
本文关键字:机器人 机器人-智能车,电子知识资料 - 机器人-智能车
上一篇:给循迹小车安上眼睛






