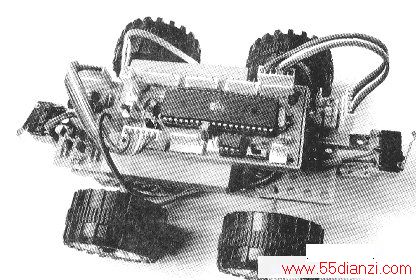
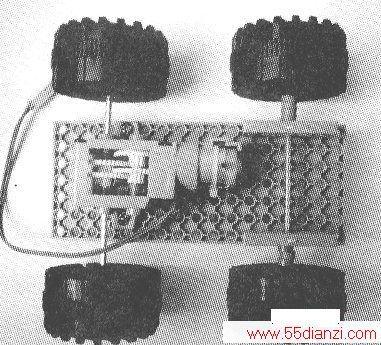
gh 图为碰壁回头机器人。碰壁回头机器人行进时碰到墙壁后反向行驶。与前二期制作的机器人相比,碰壁回头机器人添加了传感器,使机器人有了“触觉”。通过碰壁回头机器人的制作与学习,我们可以了解接触传感器的工作原理及结构,并学习编写较为复杂的选择结构和循环结构的程序。
下面按以下四个步骤进行制作:
一、搭建机器人的机械结构
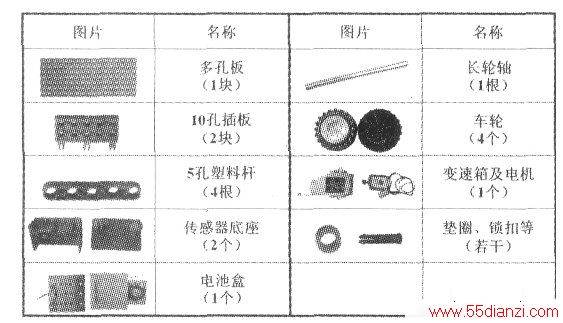
1.机械部件清单
制作碰壁回头机器人所需的机械部件如下图所示。
2.动手制作过程
第一步:用一块多孔板作为车的主体。然后安装车轮。
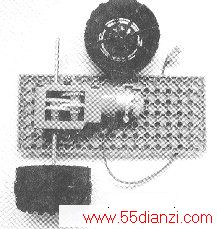
第二步:安装驱车轮
将电机变速箱固定在多孔板的一端,然后将两个车轮插接在变速箱的主轴上。如下图所示。
第三步:安装从动轮
将两块1O孔插板插接在多孔板另一端的两侧;然后将一根长车轮轴,穿过1O孔插板中间的孔,再将两个车轮插接在车轮轴的两端,插接车轮时加几个垫圈可以防止车轮左右晃动。如下图。
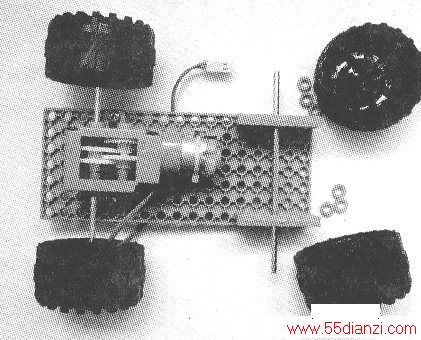
这样,车轮就安装好了。效果如下图。
第四步:安装传感器架利用锁扣和螺丝将两根5孔塑料杆固定在多孔板一端的下方,再插接一个传感器底座。这样一侧的传感器架就制作完了。如下图。接着用同样的方法。
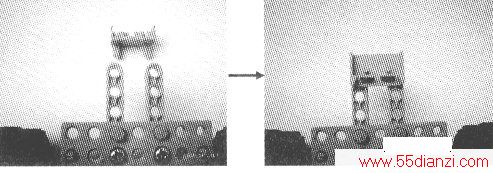
制作另一端的传感器架。
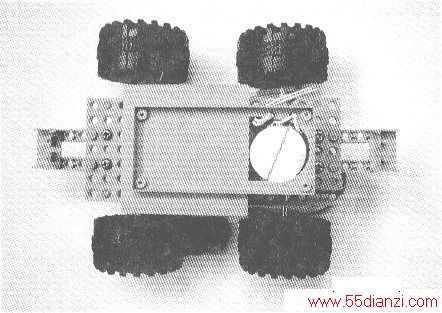
第五步:将一个电池盒固定在车体的上方。制作后如下图。
二、连接机器人的电路结构
1.电路部件清单
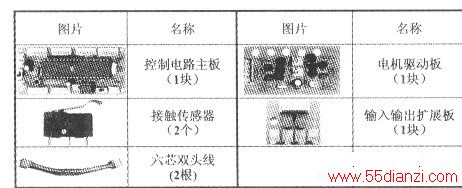
碰壁回头机器人需要的电路部件清单如下图。
2.认识电路部件
接触传感器和输入输出扩展板,如下图所示。
(1)接触传感器
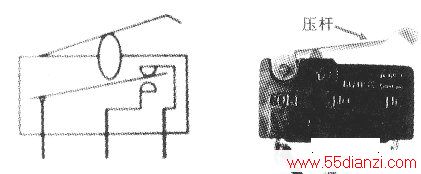
用来采集碰触信号的是接触传感器。接触传感器实际相当于一个开关。压杆未被压下,常开触点处于断开状态,电路输出高电平。压杆被压下时,常开触点处于闭合,电路输出低电平。
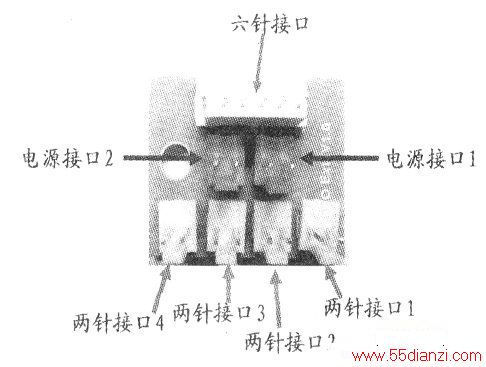
(2)输入输出扩展板
输入输出扩展板在这里起到的是方便设计,转换接口的作用。由于控制电路主板上的输入输出接口都是六针的,为了方便设计,通过输入输出扩展板,可以将一个输入、输出的六针接口对应得到4个2针的输入、输出口分开单独使用。输入输出扩展板的结构图如下图。
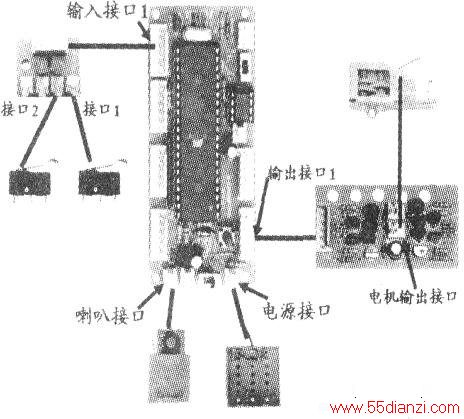
3.连接步骤
第一步:将两个传感器引线分别连接到输入输 出扩展板的两针接口1和2。
第二步:用六芯连线连接输入输出扩展板的六针接口和主板的输入接口1。
第三步:用六芯连线连接主板的输出接口1和电机驱动板的输入接口。
第四步:将电机引线连接到电机驱动板的输出接口1。
第五步:扬声器引出线连接到主板的喇叭接口。
第六步:电源线连接到主板的电源接口。
电路连接示意图如下图。
4.电子控制系统
碰壁回头机器人的电路由输入部分、控制部分和输出部分组成。输入部分主要用来采集信息,控制部分用来处理信息并发出命令,输出部分用来执行命令,它们共同构成了机器人的电子控制系统。
三、编写并下载程序
如果让机器人完成指定的任务,需编写相应程序。
我们准备好下载线后,就可以启动软件进行编程了。
这里所使用的是中夏Ⅱ型图形化编程语言环境。
1.指定任务
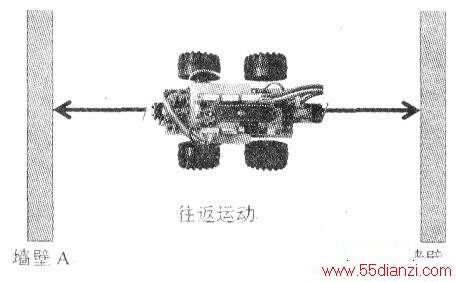
将机器人放置到一个固定环境并指定一个任务,示意图如下图。
示意图说明:机器人被置于两墙之间。它在两墙壁之间进行往返运动。
2.电机转动方向与传感器之间的关系
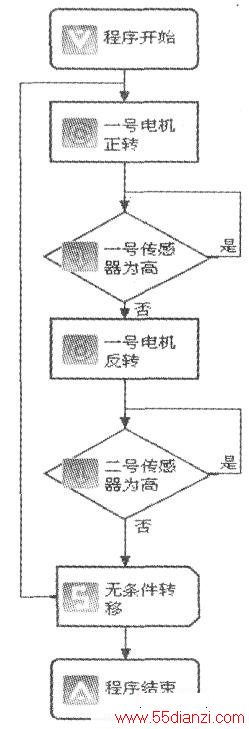
编写正式程序之前,首先测试机器人,找到电机正转将会使几号传感器碰壁这个问题的答案。在这里,我所得出的结论是:电机正转一段时间后,会使1号传感器碰壁;电机反转一段时间后,会使2号传感器碰壁。
3.编写程序
编写正式程序,这个程序相对来说较为复杂,使用前面机器人所采用的顺序结构进行编程是无法完成指定任务的。在这个程序中我们需要用到新的编程结构—选择结构和循环结构。为了能够根据接触传感器发出的不同信号做出不同的动作,我们需要使用选择结构。为了能够让接触传感器反复判断,我们需要使用循环结构。
编写程序,如下图。将其保存并下载到机器人的主板中。
四、运行与调试机器人
运行并调试碰壁回头机器人。
下表是碰壁回头机器人可能出现的问题及解决方法。供参考。
上一篇:灭火机器人电路方案






