厨卫设备 应用领域 单片机 PLC例程 电子技术 毕业设计 使用手册 工具软件 电子书籍 电工技术 家电维修 机械制造
结语
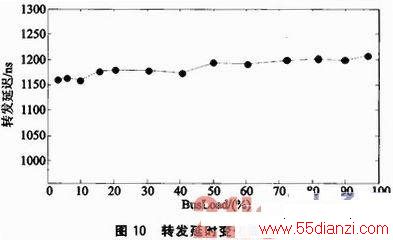
机器人伺服控制器是机器人组成的关键部件,在使用EtherCAT作为机器人控制协议时,需要关节控制器能兼容EtherCAT通信。为了解决这个问题,本文设计了基于COMX和STM32的伺服控制器,从软件和硬件两方面进行了设计,同时实现了基于FSMC接口的COMX驱动以及EtherCAT通信过程。最后,采用测试工具分析了伺服控制器在不同BusLoad下的转发延时,通过实验分析验证了基于COMX模块的伺服控制器方案的可行性。
上一页 [1] [2]
本文关键字:机器人 控制器 解决方案 伺服 机器人-智能车,电子知识资料 - 机器人-智能车
上一篇:基于STC89C52的个人卫生护理机器人的设计与实现方法