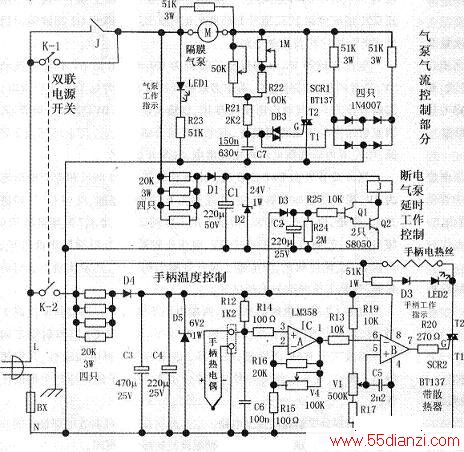
电原理图见下图。该焊台只具备手柄热风枪一个发热机构,拆除和焊接贴片元件都由手柄完成。电路根据功能分为三大部分:上部为气泵气流控制部分;中部为电热丝断电后气泵延时工作部分:图下部为手柄电热丝温度控制部分。面板安装了一只双联开关k,k-1和k-2同时导通或同时截止。
关于气泵气流控制部分的工作原理,和前面介绍的调光电路一样,白炽灯L换为电动机M,工作原理与过程相同,不再赘述。
关于右边两只51kn电阻和四只二极管的作用,可控硅导通后.形成为电容C7放电到接近0V的通路,为生成下一个锯齿脉冲做准备。
具体工作过程是这样的,将四只二极管看作桥式整流的四个臂,两只51kΩ电阻串联相当于桥式整流输出的负载,电容C7接桥式整流的两个交流腰。当可控硅导通后,T1、T2间相当于短路,压降接近ov。
此时,如果C7储存的电压极性为上正、下负,那么右上和左下的两只二极管导通,放电通路为两只51kΩ电阻和右上及左下二极管:如果C7储存的电压为上负、下正,则左上和右下两只二极管导通,放电通路为两只51kΩ电阻和右下及左上二极管。
由于两只51kΩ电阻上端接T2,所以在SCR1截止时:当市电正半周时,经左上那只51kΩ电阻、左下那只二极管导通,正端钳位于正0.7V,右面那两只二极管皆反向电压偏置而截止,同时因C7上端高于0.7V后,左上那只二极管也截止,和C7上端间联系被切断;当市电负半周时,经右上那只51kΩ电阻、右下那只二极管导通,负端钳位于负0.7V,左面那两只二极管皆反向电压偏置而截止,同理因C7上端低于负0.7V后,右上那只二极管也截止,和C7上端联系同样被切断。总之,在SCR1截止时,右面这六只元件不再是C7的放电通路。
关于电热丝断电后气泵延时工作的必要性。关闭电源开关后,如果气泵立即停止工作,那么手柄内的电热丝所储存的热量足以损坏手柄。解决的方法,就是使气泵继续工作一段时间,让气流继续流经手柄内部,使之逐渐冷却。
电源开关k闭合后,三部分电路均得电工作。图中间部分220V市电经四只20kΩ电阻并联后(5kΩ)降压- D1半波整流→C1滤波→D2稳压一形成24V直流电源,供继电器控制电路工作。观察图下部,市电经另四只20kΩ电阻并联后(5kΩ)降压→D4半波整流→C3和C4滤波- D5稳压一形成6V2直流电源,供手柄温控电路工作。
请注意6V2正极,向上经D3ΩR25Ω使Q1、Q2组成的达林顿三极管导通一继电器J得电吸合一继电器常开触点J闭合一将双联电源开关的k-1短接。与此同时,6V2正极为电容C2充足电到6V2。
此时,如果关断电源开关k,图下部的手柄温控电路因k-2断开立即停止工作,手柄电热丝失电停止工作。当然6V2正极也很快降为Ov了,D3随之截止。但是,因D3的截止,充足电到6V2的电容C2尚且有电,它和R23 (2MΩ)的乘积(放电时间常数)极大。因此,C2两端的电压能够继续保持达林顿三极管导通和继电器吸合。市电经触点J使图上和图中两部分继续有电,直到C2两端的电压降低到达林顿三极管截止→继电器失电→继电器常开触点J断开—,延时完成,图上部和中部也失去市电一所有电路停止工作。从而达到关断电、源开关k后,气泵继续工作一段时间,使手柄迅速降温的目的。
接下来分析手柄温控的工作过程。手柄电热丝由220V市电串联SCR2供电,SCR2导通后,电热丝得电发热,SCR2截止,电热丝失电停止工作,电热丝断断续续得电。在一段时间内,得电时间与失电的时间比越大,烙铁温升越高。相反,时间比越小,烙铁温度越低。
SCR2的导通与否,由触发电路决定。与SCR1的导通有两点不同,SCR2导通于一、四象限,而不是一、三象限:SCR2的导通在市电每半个周期内,只要导通都接近180度不变,而不是导通角可变。
双运算放大器LM358的其中一个即ICA及其周边元件组成一个同相放大器,对热电偶送人③脚的热电信号进行放大后,送人电压比较器ICB的反相端⑥脚,其中微调电阻V4用于调整ICA的放大倍数。手柄温度升高,ICA同相③脚电位升高,ICA输出①脚也升高。
R19、Vl、R17对6V2进行分压,送入电压比较器ICB的同相端⑤脚,其中Vl为温度调整电位器,顺时针转动它,分压点提高,ICB⑤脚电压上升。电压比较器ICB的输出端⑦脚接双向可控硅SCR2的门极C:当ICB⑦脚输出高电平(6V2)时,SCR2导通,手柄内的电热丝得220V市电发热;当⑦脚输出低电平(0V)时,SCR2截止,电热丝失电,但有余热。
这里需要说明,门极G高电平(6V2)时,市电正半周时,SCR2导通,属于第一象限触发导通;而G高电平(6V2),市电负半周时SCR2导通,属于第四象限触发导通,参见图1(d)。
关于手柄恒温控制过程。假设刚开机,温度调整电位器V1此时设为3V,即电压比较器ICB的同相端⑤脚为3V。此时手柄温度低,热电偶送人ICA③脚的热电信号电位低,经ICA放大后送人电压比较器ICB的反相端⑥脚低于3V,电压比较器ICB的输出端⑦脚高电平,SCR2无论在那个象限都可以导通,电热丝得市电发热,手柄温度升高。
手柄温度升高到一定程度—+热电偶送人③脚的热电信号电位升高到一定程度→ICA放大输出①脚电位上升一电压比较器ICB的反相端⑥脚高于3V→ICB的输出端⑦脚低电平一SCR2无论在那个象限都截止→电热丝失电一手柄温度开始下降……手柄温度下降→热电偶送人③脚的热电信号电位降低→ICA放大输出①脚电位下降一若电压比较器ICB的反相端⑥脚低于3V→ICB的输出端⑦脚高电平-SCR2导通一电热丝得电一手柄温度开始上升。
请注意,手柄温度的调整和气泵流量调整是不同的。气泵流量调整,可控硅的导通角在连续变化,负载电流在变化,图1(d)阴影面积在变化;手柄温度的调整则不同,可控硅以半个周期为单位,要么导通,要么截止(导通时导通角不变化,接近180度).虽然电热丝一会儿得电热若干半个周期,一会儿失电若干半个周期,但手柄热惰性会保持“恒温”。