
(3)跟踪图像边缘,选择滞后阈值。较大的亮度梯度更有可能被认为是边缘,但在多种情况下,指定一个阈值来确定某个梯度是否为边缘是不可能的,因此Canny采用了滞后阈值。
滞后阈值需要高低两个阈值。假设图像中的重要边缘都是连续曲线,这样可以跟踪给定曲线中模糊的部分,并丢掉一些虽然产生了大的梯度但没有组成曲线的噪声像素。所以从一个较大的阈值开始,这将标识出那些确信的边缘。从真正的边缘开始,并利用前面导出的方向信息,在图像中跟踪整个的边缘。在边缘跟踪时采用低阈值,这样就可以跟踪曲线的模糊部分直至回到起点。
这个过程一旦完成,就可得到一个二值图像,其中的每个点表示是否是一个边缘点。
与使用一个阈值相比,Canny边缘检测算法使用两个阈值使得操作更加灵活,但还是存在的普遍问题,阈值设置过高,重要信息就可能被漏掉;阈值设置过低,干扰信息又会被看的重要。难以给出适用于所有图像的通用阈值问题。
采用的解决方法首先是计算图像的中值median,然后根据以下公式为高阈值high_thresh和低阈值low_thresh赋值,调用Canny边缘检测算法对图像进行边缘检测。
high_thresh=0.66×median;
low_thresh=0.33×median; (4)
图6和图7分别显示了经典Canny边缘检测和基于中值的Canny边缘检测结果,其中图6是经过手动调整到最佳结果产生的图像,图7是利用自动设定阈值得到的结果,从中可以看出基于中值的Canny边缘检测算法可以实现自动边缘检测的目的。

2.2 Hough变换
霍夫变换(Hough Transform)是一种检测直线和解析曲线的有效方法。它把二值图像变换到Hough参数空间,利用参数空间极值点的检测来实现目标的检测。霍夫变换不但可以用于检测图像中的直线,还可以扩展到任意曲线的识别,多为圆和椭圆。
运用两个坐标空间之间的变换,霍夫变换将在一个空间中具有相同形状的曲线映射到另一个坐标空间的一个点上形成峰值,因此,霍夫变换把曲线的检测问题转换到参数空间中对点的检测问题,通过在参数空间里进行简单的累加统计完成检测任务。
考虑直角坐标系中的一点(x0,y0),经过该点直线的一般方程可以写为
ρ=x0cosθ+y0sinθ (5)
参数ρ和θ可以唯一地确定一条直线,这在ρ-θ空间内是一条正弦曲线。若将x—y平面内同一条直线的点列变换到ρ-θ空间,则所以正弦曲线都经过一点(ρ’,θ’),所以正弦曲线在ρ-θ空间其他各处都不相交。因此,X—Y平面内一条直线上的无数点变换到ρ—θ空间内时,经过(ρ’,θ’)的次数为无穷,经过其他各处次数都为1。也就是说,Hough变换将X—Y平面内的一条直线映射到了ρ—θ空间中的一个点。因此,Hough变换把直线检测问题转换到参数空间里对点的检测问题,通过在参数空间里进行简单的累加统计完成检测任务。
图8为将Hough变换应用到边缘检测图中得到的初始结果。

可以看到,由以上过程得到的结果存在伪车位线,需要进一步对结果进行优化。注意到,在进行边缘检测后每条车位线都是双边缘的,另外,这两个边缘是相互平行的且具有固定的宽度和近似相等的长度,而且它们都反应了同一条车位线,因此为了减少计算量,可以计算一个边缘,而非两个边缘,在这里取两条边缘线的平均值作为实际的车位线。基于以上先验特征对初始识别结果进行条件限制及优化,得到如图9所示的最终识别结果。

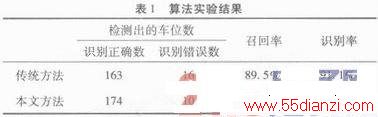
3 实验结果及分析
系统的硬件部分主要由鱼眼摄像头、图像处理单元和显示屏组成。由于车身内部空间有限,图像处理单元无法由PC机完成,因此在本系统中,设计使用DSP来完成视频图像的处理。软件部分,以Visual Studio 2008为开发环境,并调用OpenCV库来完成算法的实现。实验选取了200张不同情况下的车位图像对算法进行了验证,并在相同的情况下将本文的方法与传统的Hough方法进行了对比,实验中采用召回率和识别率来对算法的效率进行估计,其定义分别如下。

从实验可以看出,本文提出的基于自适应思想的车位线检测与识别方法具有较高的精确度和鲁棒性。
4 结束语
随着停车难的问题日益严峻,泊车辅助系统的应用越来越广泛,本文提出了一种综合运用自适应边缘检测和Hough变换等算法进行自动识别车位线的方法。通过实际采集到的图像对算法进行验证,并与传统方法进行了对比,验证了本文所提方法的高精度和高鲁棒性。
本文关键字:检测 传感-检测-采集技术,电子知识资料 - 传感-检测-采集技术






