m_y=mycosψ-mxsinψsinθ-mzsinψcosθ (4)
3.4 地磁数据处理子程序
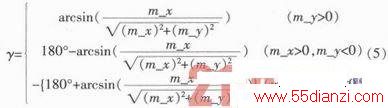
由地磁数据修正子程序得出的在轴方向和轴方向上的地磁感应强度分量分别为m_x和m_y,考虑到反正弦函数的值域为
,则横摆角的取值如下:
4 结论
本文完成了基于无线传感器网络的角度监测系统的设计,克服了已有监测装置中传感器单一的弊端,满足对空间物体三维姿态的实时、高精度、无线监测的要求。系统使用三轴地磁传感器对水平面内的角速度值进行修正,使用三轴加速度计对垂直面内的角速度值进行修正,从而精确测量空间物体三维姿态。






