温度补偿电路的设计如图6所示,数据输入/输出脚连接到单片机的P0.1脚,电源接口接入+5 V的电压,外加5.6 kΩ的上拉电阻,因为DS18B20是单总线温度传感器,数据线是漏极开路,如果DS18B20没接电源,则需要数据线强上拉,给DS18B20供电;如果DS18B20接有电源,则需要一个上拉即可稳定的工作。由于DS18B20在使用中不需要任何外围元件,全部传感元件及转换电路集成在形如一只三极管的集成电路内,检测的温度值在内部进行转换,温度测量结果直接以数字信号输出,单片机对由DS18B20输出的信号进行读取,经过软件对温度数字值实现处理。
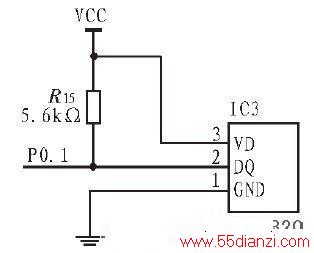
图6 温度补偿电路
2.5 主电路原理图
该系统主电路原理图如图7所示,单片机采用89C52系列,单片机使用外部时钟源,外接6MHz的晶振,由P0.0口直接输出40 KHZ的驱动信号给放大电路。接收到回波后,经由CX20106的滤波,产生中断信号,并由p3.2口输出进行中断。显示电路采用简单实用的3位数码管,连接单片机AT89C52的P0口,而三极管连接P2口,作数码管的位选。工作时,首先将系统初始化,启动计时器。并由P0.0脚发出40KHZ的驱动信号,同时打开INT0中断,并且开始等待接收到的回波和中断信号,若接收到回波(单片机接收到中断信号),计时器停止计时,保存时间信息,并且根据温度补偿计算出当前环境下的声速,计算出当前待测距离后储存,并调用显示子程序。测出距离后结果将以十进制BCD码方式传送到LED显示,然后再发超声波脉冲重复测量过程。
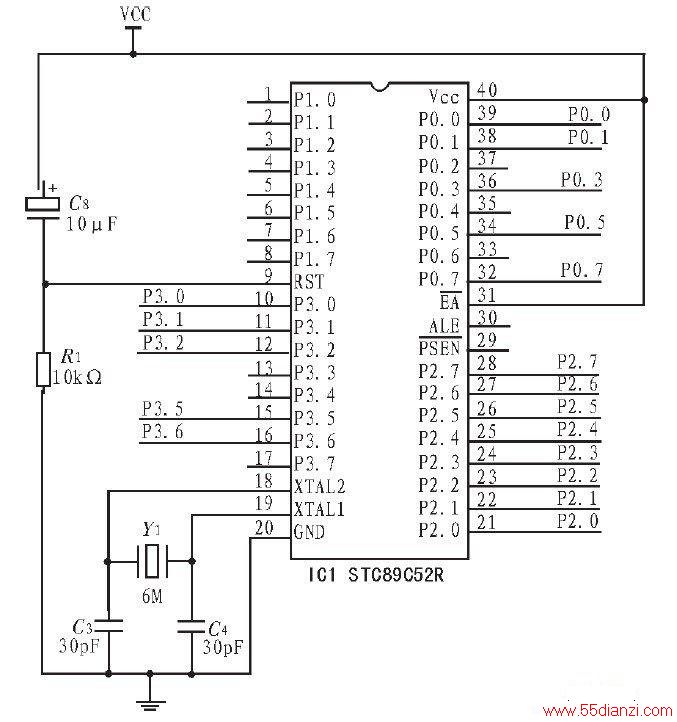
图7 超声波测距主电路图
3 结论
经过实测,本测距仪能够迅速的测出250 m以内的短距离障碍物,在30-200 cm范围内,误差能控制在1 cm以内,本设计具有简单实用,能耗低,成本低等特点。经过实际测试,发现系统的精度能满足普通需求,若需要进一步提高精度,可采用精度更高但系统更加复杂的双频超声波测距的方法。
三、基于单片机的智能泊车系统设计方案
摘 要:一个有效的智能泊车系统,不仅能帮助驾驶者快速、安全地完成泊车操作,从而减轻驾驶员负担,减少交通事故,而且能够有效提高汽车的智能化程度,增加汽车的附加值,从而带来巨大的经济效益。使用AT89C52单片机作为小车的主控制器,在该控制器基础上,添加了光电避障电路、测速电路、光源引导电路和电机驱动电路,从而实现了智能泊车系统设计。该系统结构简单、成本低,并在实验室中取得了预期的效果,能够使小车进入指定的停车位。
0 引 言
随着我国汽车数量逐年急剧增多,泊车位、停车场的数量却跟不上其增长的步伐,越来越多的人为如何泊车而发愁。日益拥挤的泊车环境要求人们对汽车的泊车技术更加地娴熟,这就更加重了人们工作之外的紧张情绪,降低了人们的生活质量。因此,如何解决泊车过程中的不便利,消除安全隐患,迅速、准确、安全地将汽车停靠到合适的位置,逐渐引起了人们的关注。
1 系统的工作原理及功能
智能泊车系统可分为控制部分和信号检测部分。
其中信号检测部分包括障碍物检测模块,光源检测模块和速度检测模块;控制部分包括控制器模块,电机控制模块。智能泊车系统基本模块方框图如图1所示。
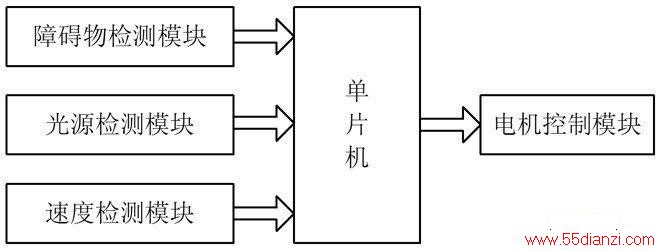
图1 智能泊车系统基本框图
系统工作原理如下:在小车启动之后,通过霍尔传感器A44E进行小车的速度检测,对小车进行智能限速,小车行进过程中通过红外光电传感器避障,车库系统发送光源指示信号,光敏三极管接收车库指示信息,使小车到达指定车库后,停车。
1.1 单片机最小系统设计
AT89C52是51系列单片机的一种,是一个低功耗,高性能,CMOS 8位单片机,片内含8KB的可反复擦写的FLASH只读程序存储器和256B的随机存取数据存储器(RAM),由ATMEL公司采用高密度、非易失性存储技术生产,兼容标准MCS-51指令系统,片内置通用8位中央处理器和FLASH存储单元,片内有ROM/EPROM,因此,这种芯片构成的最小系统简单可靠,只要将单片机接上时钟电路和复位电路即可。
1.2 避障电路设计
红外光电式传感器具有非接触、响应快、性能可靠、体积小、安装轻便等诸多特点,因此在工业自动化装置和智能小车中获得广泛应用。本设计中采用的光电避障传感器是HS0038B.红外光电接收电路工作原理为:当接收到载波频率为38kHz的脉冲调制信号时,首先,HS0038B内的红外敏感元件将脉冲调制红外光信号转换成电信号,再由前置放大器和自动增益控制电路进行放大处理,然后通过带通滤波器进行滤波,滤波后的信号由解调电路进行解调,最后由输出电路进行反向放大并输出低电平;未接收到载波信号时,电路则输出高电平。红外发射电路由555定时电路产生方波,对红外发射管进行调制。
1.3 A44E测速电路设计
霍尔传感器A44E在测速系统中的主要作用是车轮转速采集。车轮每转一周,磁铁经过A44E一次,A44E的第3脚就输出一个脉冲信号,脉冲信号的周期与电机的转速有下列关系:
![]()
式中:n为电机转速;P 为电机转一圈的脉冲数;T 为输出方波信号的周期。
脉冲信号作为单片机AT89C52的外中断信号,从P3.2口输入。
1.4 电机驱动电路设计
动作执行单元为驱动小车左右轮的两个减速直流电机,控制它们的转速,就控制了小车的运动状态。但是由动作控制单元发出的控制信号非常微弱,无法直接驱动直流电机,须匹配设计合理的驱动电路,常用的驱动电路为H 桥。在设计过程中发现,由于三极管导通、关断的时间不统一,导致用三极管搭建的H 桥在电机电流换向的时候经常发生微短路,使得三极管发热现象很严重,整个电路电源波动很大,非常耗电。因此,本设计最终采用了集成H 桥L298.除此之外,在设计过程中发现电机转动产生的反向电动势会严重影响传感器的输出状态,将错误的路径信息送给处理器,导致小车经常产生错误动作。因此,本设计采用了双电源供电,即传感器和芯片共用一组电源,电机专用一组电源,中间信号的传输采用了4N25光耦电路进行电气隔离。
1.5 光源引导电路设计
本设计采用光敏三极管作为光源检测传感器,因为其感光电压变化明显(电压值变化在60~100mV 左右),价格便宜。光源引导模块需要在小车前方安装3个光敏三极管,通过车库发出的光源信号来引导小车到指定车库停车,使用LM324作为光源引导模块的核心放大器件,将信号进行放大处理。
1.6 停车场系统设计
为了更好地完成小车避障、光源引导和入库过程,停车场系统设计也是十分重要的。停车场系统设计图如图2所示。
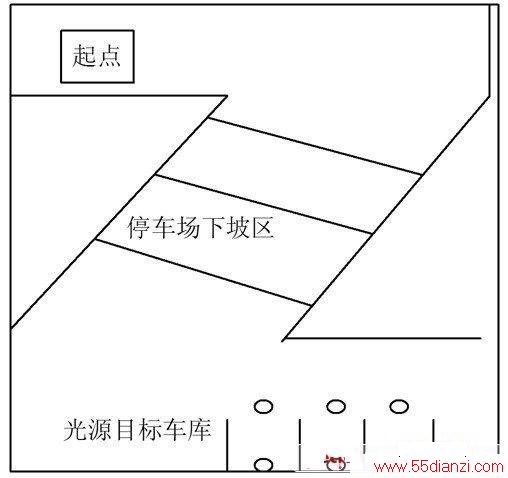
图2 停车场系统设计图
2 软件设计
系统软件设计在Keil C51 集成开发环境下进行。软件主要包括系统主程序、避障子程序、光源引导子程序和测速限速子程序等。泊车系统整体流程如图3所示,避障程序流程图、光源引导程序流程图分别如图4,图5所示。测速限速电路软件设计思路是将每圈的时间换算成速度,再与设定的速度比较,如果所测速度大于设定值,则控制电机减速到设定值;如果所测速度小于设定值,则控制电机加速到设定值,完成小车的智能限速。
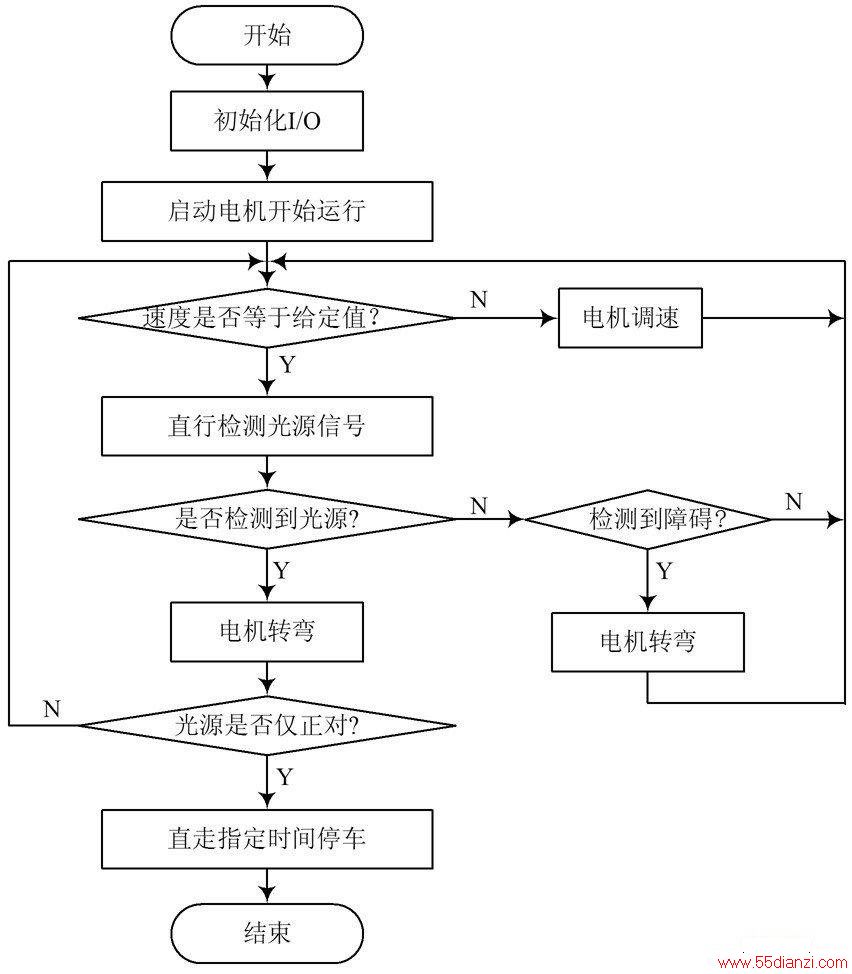
图3 智能泊车系统总体流程图
3 各模块测试及连接
各模块连接:小车舵机左转输入端接P3.4;小车舵机右转输入端接P3.5;小车驱动电机前进输入端接P3.6;小车驱动电机后退输入端接P3.7;光电避障模块左传感器输出端接P1.0;光电避障模块右传感器输出端接P1.1;光源引导模块左传感器输出端接P1.2;光源引导模块中间传感器输出端接P1.3;光源引导模块右传感器输出端接P1.4。






