前 言
随着车辆数量的迅速增加,高效的车辆管理调度系统已经成为各个车辆管理调度部门亟需的工具。而以 GPRS(通用分组无线业务)和WLAN(无线局域网)为代表的无线通信技术、以GPS(全球定位系统)为代表的无线定位技术以及日益成熟的嵌入式系统软硬件,都为先进的无线车辆管理调度系统提供了技术基础。
本文所实现的车辆管理调度系统中,车载终端是基于 Intel XScale处理器的嵌入式系统,外扩WLAN和GPRS实现与管理调度中心的无线通信;外扩GPS模块进行实时定位。而管理调度中心则是运行于PC机上并且具有友好人机界面的软件系统。PC机扩展WLAN和GPRS模块,从而可以实时地获知系统中车辆的当前位置等信息并进行调度。同时,系统预留了丰富的功能扩展空间,可进行二次开发。
1 系统总体方案论证与选型
在本系统的总体方案中,无线通信技术、无线定位技术和嵌入式系统软硬件技术是车辆调度系统实现的3个关键要素。以下分别对这3方面的主要备选技术进行介绍,并通过论证选取最合适的技术方案。
无线通信方面,GPRS和WLAN两者各有优缺点。CPRS主要优点是具有广阔的覆盖范围,可以支持语音传输;而其劣势则主要是数据传输速度较慢,同时其使用费用将与数据流量成正比。WLAN的优缺点表现出与GPRS互补的特征,其主要优点在于可以提供较高的数据传输速率,同时使用费很低,一旦WLAN网络架设完成后,除了很少地维护工作外,其他几乎不涉及任何费用;其劣势主要是尚不支持语音业务,同时覆盖范围一般较小,目前尚无法与GPRS相比。基于上述分析,所以从本系统功能优化和利于使用的角度考虑,决定将两者都加入到系统中。同时,考虑到GPRS和WLAN在数据速率以及使用费用上的差异,所以当车辆处于WLAN覆盖区内时,管理调度中心则优先选择通过WLAN网络与车辆进行通信;当车辆处在WLAN覆盖区域之外而在GPRS覆盖区域内时,则通过 GPRS与车辆进行通信。
无线定位系统方面,目前主要有美国的GPS、俄罗斯的CLONASS、我国自主开发的“北斗卫星定位导航系统”等可供选择,其中GPS的性能、覆盖范围、定位精度等性能等具有明显优势,目前应用也最为广泛。因而,决定采用GPS作为本系统的无线定位模块。
嵌入式系统的软硬件方面,目前有很多可选择的方案。以下分硬件和软件两部分讨论。
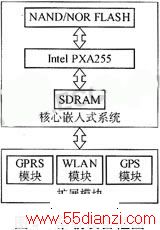
在硬件方面,嵌入式CPU的选择非常重要。目前使用较为广泛的嵌入式CPU主要有:Intel的XScale系列,主要用于手持终端;SAMSUNG的 S3C24XX系列,主要用于消费类电子产品;FreeScale的PowerPc和ColdFire系列,主要用于POS机、工业控制;Atmel的 AT91系列,主要应用于工业控制等。根据本系统需要扩展的WLAN等各种外设模块以及有可能需要处理多媒体业务的应用需求,因此选用Intel的 XScalePXA255@400 MHz作为车载设备的CPU。此CPU主频为400MHz,广泛应用于HP、Dell等国际知名厂商所生产的个人手持终端中,具有性能优秀、运行稳定的特点。在CPU选定的基础上,选用64 MB SDRAM、16MB NOR Flash存储器和128 MB NAND Flash存储器,与CPU共同构成核心嵌入式系统。
在嵌入式系统的软件方面,首要的是操作系统(OS)的选择。主要的备选方案有WinCE.Net和嵌入式Linux。其中,WinCE.Net具有更类似于Windows的用户界面和操作方法,可以使实际使用更加便捷。同时,由于本系统的车载终端需要让最终用户可自行定制开发应用软件,所以具有便捷的软件开发平台也是很重要的。在此方面,WinCE.Net也具有明显的优势,因此选用WinCE.Net作为车载没备的OS。
除了上述3方面的论证之外,还有管理调度中心的问题。为了实现的便捷,管理调度中心采用一台性能较强的PC机作为服务器,通过扩展模块接入GPRS网络、WLAN网络,同时运行管理调度软件,从而完成管理和调度的工作。
根据以上的方案论证与选择,可以得到如图1所示的系统方案框图。

2 系统的硬件设计
如上所述,管理调度中心准备采用PC机作为硬件平台。因此,本系统的硬件设计工作主要集中在车载端。根据上述的方案论证与选型,可以得到如图2所示的车载终端硬件框图。
在扩展模块中,GPS模块选用FALCOM公司设计生产的JP7模块,它是一个12通道GPS接收机,具有25.4 mm×25.4 mm x3 mm的超小体积,支持3D/2D/差分定位,3D定位模式时定位误差最大为10 m。在本系统中,将此模块通过两线串口连接到核心嵌入式系统上,从而可以使车载设备能够实时地获得准确的位置和时间信息。
CPRS 模块选用的是SIEMENS MC35i,它是一个全功能的GSM/GPRS模块,支持 EGSM900和GSM1800双频,支持GPRS Class 8,数据速率最高可达85.6 kbit/s。在本系统中,将此模块通过8线串口连接到核心嵌入式系统上,所有工作都由核心系统通过AT指令进行控制。它既可以作为一个能够拨打电话、收发短信的蜂窝电话,同时在需要接人GPRS网络时也可以作为一个无线Modem。
WLAN模块的选择主要是考虑到市场上已经有了各种性能稳定、接口多样的WLAN网卡产品,而我们所选择的PXA255 CPU可以很容易地外扩出PCMCIA接口,因此决定选用PCMCIA接口的WLAN网卡。在本系统中所选用的网卡型号为Cisco LMC352,主要是由于此款网卡的性能较好,同时也支持外接双天线,这样可以将天线安装在车载终端外甚至汽车外壳上,从而减少汽车外壳对WLAN信号的屏蔽作用。
除了上述的扩展模块外,还从CPU上引出了USBDevICe接口,可用于软件的调试;扩展了2个 RS-232串口,可用于今后连接其他的串口设备;扩展了1个VGA接口、2个PS-2接口,这样就可以在车载终端上使用显示器和键盘鼠标,实现车载终端的可视化操作,同时也方便调试和更新软件。
3 系统的软件设计
3.1 管理调度中心软件
管理调度中心软件流程如图3所示。
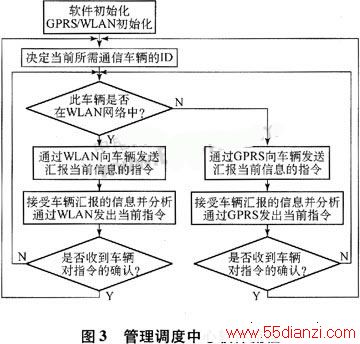
管理调度中心的软件运行于一台扩展 GPRS和WLAN模块的PC机或者小型服务器上,可以随时接入GPRS和WLAN网络,而接入网络后的控制和数据收发则由管理调度软件来控制。图3中未标出软件退出路径,因为实际使用中在任何时刻用户都可以关闭软件而退出管理调度软件系统。
本软件的开发环境为 Visual Studio.NET 2003,采用C语言。软件首先对与GPRS模块相连接的串口进行初始化,同时也检测本机扩展的WLAN模块是否已经找到附近的AP并接入,正常情况下两者的初始化均可在较短时间内完成,然后进入空闲状态。当用户有调度的要求时,则需要首先确定日标车辆的ID(标识符),这个ID既可以是每个车载终端唯一的IP地址或车牌号码,也可以人为地给每个车辆指定一个更容易记忆的ID。随后判断此ID对应的车辆是否处于WLAN网络所覆盖的区域内,这是通过在 WLAN网络上向该车载终端发送一个查询信息来实现的。如果车辆在WLAN网络中,那么车载终端立即向调度中心发送消息确认自己处于WLAN网络中,此时软件则优先使用WLAN与车辆进行通信;如果车辆不在WLAN网络中,那么无法收到调度中心的查询信息,因而也无法向调度中心回复确认消息,此时调度中心将使用GPRS与车辆通信。使用GPRS的过程中涉及到一个移动IP的问题:车载端每次拨号连接上GPRS网络时,其IP地址一般都不一样,所以无法采用 WLAN网络中的IP地址与车辆绑定的方法。此时常用的解决方法是调度中心采用短信方式,首先要求车载终端上报其IP地址,然后再进行通信。当管理调度中心的指令发出后,软件则等待车载端回复确认消息。通过车辆确认的方法,可以确保车辆准确地收到了管理调度中心发出的指令,使得系统的误操作概率最小。
3.2 车载终端软件
车载终端软件运行在基于XScale PXA255的嵌入式车载终端上,采用WinCE.Net 4.2作为操作系统。将不同的车辆管理调度系统中存在很大差异的具体业务内容剥离,即可得到如图4所示的车载端软件流程图。图中未标出软件退出路径,因为实际使用中在任何时刻用户都可以关闭软件而退出车载终端软件系统。
本系统的车载端应用软件采用Visual Studio.NET中的Smart Client工程模式进行开发,使用C语言。如图4所示,本软件首先进行初始化的工作,将GPRS/WLAN/GPS所在的各个端口打开,开始供电。对于 GPRS模块,上电后则会自动搜索GSM网络。如果所在位置有GSM网络覆盖,则自动接入并稳定在可以随时拨打/接听电话和收发短信的空闲状态;如果无 GSM网络覆盖,则定时重新搜索网络。对于WLAN模块,上电后通过驱动程序控制其开始搜索WLAN网络,如果搜索到合适的AP则自动接人并设定加密认证信息,以防止被攻击;如果未搜索到,则定时重新搜索网络。对于GPS模块,冷启动后,在4 800 bit/s默认波特率上输入控制命令,调整波特率至9 600 bit/s,同时通过命令控制GPS在后面的工作中每隔一个固定时间间隔输出一次定位信息,本软件所设定的这个时间间隔为1 s。考虑到民用GPS在非差分模式下普遍的定位误差在1 m~15 m,所以这个时间精度可以满足绝大多数应用的要求。
上一篇:非标准硬件的设备驱动程序的编写






