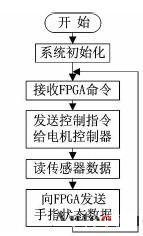
图8 DSP控制流程图
4假手抓取实验
基于上述设计,研制出HIT V假手样机,进行抓取实验(图9),可实现多种动作模式的抓取,分别为:两指捏取、三指捏取、圆柱抓取、球形抓取、单指指向、胡克抓取、侧边捏取、五指端取。控制过程中,系统工作稳定,满足仿人假手运动控制和传感器信息采集要求。

图9 多指抓取实验
5 结论
本文介绍了结合FPGA与DSP的仿人假手控制系统的设计组成与工作流程。该控制系统体积小巧,可完全安装于假手内部。实验证明:该系统运行可靠、控制灵活,使用效果良好。
本文关键字:暂无联系方式DSP/FPGA技术,单片机-工控设备 - DSP/FPGA技术






