3.4 通信协议软件
通信协议软件在Windows XP操作系统上用汇编语言开发而成,其编制方案简要介绍如下:
(1)主控微机发送数据
当主控微机发送数据时,需要自动记录指令的命令字节,即需要记录接收该指令的控制器ID号以及指令号Code。
(2)控制器接收数据
控制器接收数据时,首先将会进行ID校验,如果一致则接收,然后根据指令号Code决定需要接收的数据字节数。如果指令ID号与自身的ID号不一致或者在2 ms内没有接收到完整的数据,控制器将会把已接收的数据清零并等待主控微机重新发送。
(3)控制器发送数据
当控制器接收到询问指令,并确认ID一致后,将返回该指令的命令字节(ID+Code)和相应的询问数据。对于控制指令和设定指令,则只返回一个命令字节(ID+Code)。
(4)主控微机接收数据
主控微机接收到控制器返回的数据后,对于控制和设定指令,将会把返回的数据与发送记录相比较,如果一致则删除发送记录,否则,认为通信有误,进行出错处理;对于询问指令,将把接收到的数据显示或储存以备后用。
4 实 验
图9是开发出来的控制器和驱动器。根据软件设计方案编制和调试程序后进行了位置控制、速度控制、电流控制的实机实验。
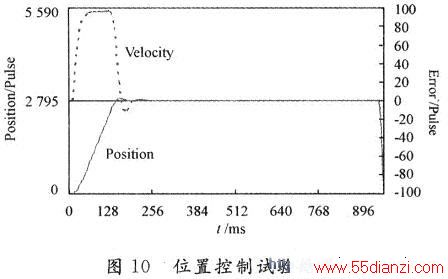
位置控制实验结果如图10所示。位置控制的单位是编码器的脉冲数(Pulse)。图10指出当目标位置是2 795时,位置控制能够精确地控制电机到达指定的位置。通过多次重复实验,其误差均小于±0.2脉冲。
速度控制实验结果如图11所示。速度控制以脉冲数/周期(Pulse/0.4 ms)为单位。
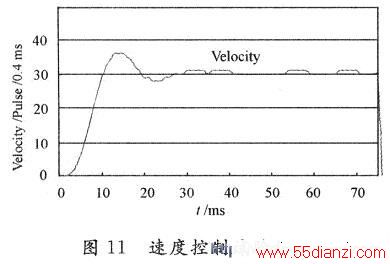
图11指出当目标速度是30 Pulse/O.4 ms时,速度控制能够精确地控制电机以指定的速度运行。通过多次重复实验,其误差均小于±2 Pulse/O.4 ms。
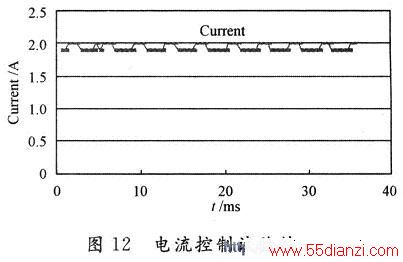
电流控制实验结果如图12所示。电流控制以电机的额定电流与最大指令比(A/7 FH)为单位。图12指出当目标电流是2 A时,电流控制能够精确地控制电机在指定的电流下运行。通过多次重复实验,其误差均小于±O.1 A。
实验表明本文提出的控制器位置精度、速度精度、电流精度能满足多轴服务机器人的需要。
5 结 语
提出的控制器为 嵌入式 服务机器人控制器的研究和开发提供了一种新的控制和通信模式。实验结果指出该控制器的控制精度能满足多轴服务机器人的需要。该项目的研究将有助于推动我国服务机器人控制器的发展,具有较好的应用前景。






