3. 1 通信控制芯片的初始化和收发操作
对SJA1000T的基本操作如下:
①初始化:硬件复位,进入复位方式; 设置为BasiCCAN 模式,CDR = 0x08 ;设置波特率控制字BTR0 ,BTR1 ;设置接收码和接收掩码ACR、AMR;完成设定,进入工作模式,CR = 0x1E。
②发送:将CAN 总线报文写入SJA1000T 发送缓冲区TX2IDR1~2 , TXDR1~8 ;写发送命令,CMR = 0x01。
③接收:从RXIDR1~2、RXDR1~8 读出CAN 一帧CAN 总线报文;将SJA1000T 的接收缓冲区窗口滑动到下一帧,CMR =0x04。
RTL8019AS内部有页地址为0x40~0x79 的256个缓冲页,每页256B。这些缓冲页的一部分作为接收缓冲区,起始页地址和结束页地址通过PSTART、PSTOP 寄存器配置,剩余可以作为发送缓冲区使用。硬件把接收缓冲区作为环形缓冲区使用,CURR寄存器和BNRY寄存器分别指明缓冲区中未使用部分的起始和结束页地址。硬件接收到数据后会自动修改CURR 的值,而BNRY需要读出一帧数据后由软件修改;对RTL8019AS的基本操作如下:
①初始化:硬件复位操作,进入停止方式;写入物理地址到PR0~PR5 ,写入0x00 到多点接收地址寄存器MAR;设置内部发送缓冲区器起止页地址到PSTART、PSTOP;写入当前
页地址到CURR和页地址界寄存器BNRY中;进入正常工作方式,CR =0x02。
②发送:将以太网报文载入在RTL8019AS中设置的发送缓冲区中;写发送起始页地址到TPSR ,写发送内容长度到TBCR0~1 ;写发送命令,CMR = 0x1A。
③接收:从在RTL8019AS中设置的接收缓存页中读出一帧以太网报文;根据报文长度改变页地址界限BNRY的值。
3. 2 UDP 和CAN 报文的转换
CAN - Ethernet 通信模块收到CAN 总线报文时,将整个报文封装在一帧UDP 报文中;接收到目的端口与自己的工作端口相符的UDP 报文时,取出其中的数据段作为一帧CAN 总线报文。以太网报文到CAN 总线报文的具体转换过程如下:
①如果接收到的以太网报文包含IP 报文,分解出IP 报文,否则抛弃这帧报文;
②如果IP 报文的目的地址匹配,并且包含一帧UDP 报文,分解出UDP 报文,否则抛弃;
③如果UDP 报文的目的端口匹配,分解出其中的CAN 总线报文,否则抛弃。
CAN 总线报文到UDP 报文的转换过程是:
①接收到的CAN 总线报文装入UDP 报文的数据段,计算校验和,完成UDP报文封装;
②加上IP 报文头部,计算校验和,完成IP报文封装;
③加上以太网报文的头部,报文尾部的校验和不需要软件完成,RTL8019AS在发送时会自动添加。
为了减少在转换过程中的数据拷贝,定义了如下数据结构。从CAN总线上收到的报文直接放在Frame结构体的can[ ]成员中,并记录长度,封装为UDP报文的过程就是填充Frame结构体中其他成员的过程;从以太网上收到的报文逐字节放入Frame结构体中,CAN 报文就包含在can[ ]成员中。
struct EthHead {
unsigned char DstPhyAddr[6 ] ; / / 以太网目的地址
unsigned char SRCPhyAddr[6 ] ; / / 以太网源地址
unsigned short Prt ; / / 协议标识
} ;
struct IPHead {
unsigned char VerLen ; / / 版本号和头长度
unsigned char ServType ; / / 服务类型
unsigned short Len ; / / 长度
unsigned short ID; / / 报文ID
unsigned short FlagAndFrag ; / / 标记和分段
unsigned char TTL ;
unsigned char Prt ; / / 协议标识
unsigned short HdChksum; / / 头校验和
unsigned char srcIP[4 ] ; / / 源IP 地址
unsigned char dstIP[4 ] ; / / 目的IP 地址
} ;
struct UDPHead {
unsigned short srcPort ; / / 源端口号
unsigned short srcPort ; / / 目的端口号
unsigned short Len ; / / 长度
unsigned short Chksum; / / 校验和
} ;
struct Frame {
struct EthHead ethhd ;
struct IPHead iphd ;
struct UDPHead udphd ;
unsigned char can [ 10 ] ; / / 放置CAN 报文
short canlen ; / / 记录收到的CAN 报文长度
} ;
3. 3 通信程序的实现
处理器对SJA1000T和RTL8019AS 的操作都使用了中断方式,通信模块的软件程序可以分成SJA1000T 中断服务程序、RTL8019AS中断服务程序和主程序3 个部分,是典型的前、后台处理结构。在中断服务程序中,将收到的CAN 总线报文和以太网报文读入内存中的缓冲区,并累加缓冲区内还未处理的报文计数。在主程序循环中,轮流处理两个缓冲区中的报文,并减小报文计数值。图6 是SJA1000T的中断服务流程、RTL8019AS中断服务流程、主程序的流程。由于SJA1000T内部的接收缓冲区只有64B ,所以在程序中定义了容纳32个Frame结构体数组can- rbuf [ ]并组成环形缓冲区。同时也定义了相同大小的数组eth- rbuf [ ]组成以太网接收的环形缓冲区。
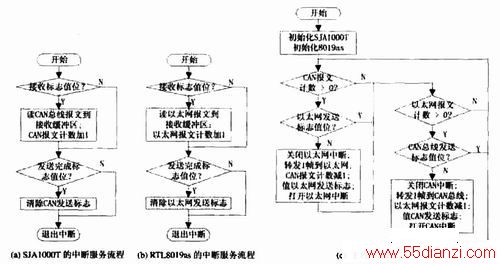
图6 通信模块软件流程图
在调试过程中发现,如果转发过程被特定的中断程序打断,可能发生报文计数错误;如果向RTL8019AS写入待发送报文的过程被以太网接收中断打断,就无法恢复写入过程了。因此在转发过程中应屏蔽相应的中断。
4 结束语
采用上述方法实现的CAN-Ethernet 通信模块,解决了以太网和现场总线CAN 总线之间互联问题,可以根据应用的需求,进行灵活的配置和改进,提高系统的性能和可靠性。实际证明,在局域网环境下模块工作可靠,在以太网负载适中时,只有很小的通信延迟。它为CAN-Ethernet 的互联提供了低成本、高性能及灵活的解决方案。






