图7 基于混合策略的上位控制规律针对汽车主动避撞对象的LQ 控制方法、基于时间-能量最优的控制方法以及基于混合策略的控制方法的仿真结果如图8 所示。从仿真结果可见,基于混合方法的上位控制器针对汽车主动避撞系统的特点,巧妙地结合了上述两种控制器的优点,即在保证良好的稳态精度的同时,改善了系统的响应速度。虽然该控制器的控制量相对较大,但仍然在舒适性的要求范围内。
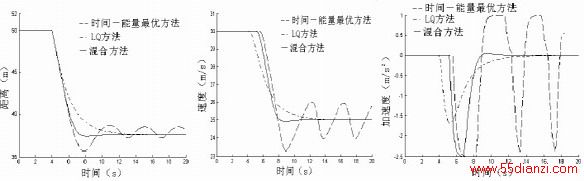
a) 车间距离响应曲线 b)被控车速响应曲线 c)被控车加速度响应曲线
图8 三种控制器的仿真曲线
2.2.3 下位控制方法研究
由于车辆制动、驱动力特性中含有强烈的非线性,同时车辆质量变动、道路坡度及风阻等外部干扰因素的存在,车辆下位控制器设计时控制系统的鲁棒跟随性和鲁棒稳定性往往不能得到兼顾[10>。针对这一问题,本研究设计了基于模型匹配方法的二自由度控制器来实现车辆主动避撞系统下位控制的控制性能。 控制器结构如图9 所示。此处的二自由度控制器是指参考输入信号和控制对象的输出信号情报分别独立使用,就是既有反馈又有前馈的控制器。此控制器的特征是闭环目标值应答特性可以通过反馈特性的设计来独立设定。在这种情况下,利用前馈补偿器设定目标值的应答特性即模型匹配特性,利用反馈补偿器的设计实现反馈特性即系统的鲁棒跟随特性和鲁棒稳定特性。
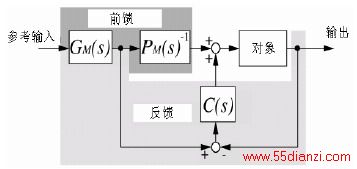
图9 二自由度模型匹配控制器
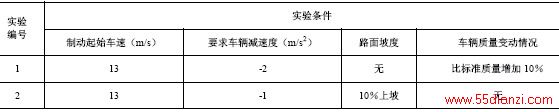
针对汽车主动避撞系统下位控制模型匹配控制器性能,进行了如表2 所示内容的实车实验。实验结果如图10 所示。从实验对比结果可见,对于车辆及环境中存在的不确定因素对控制结果的干扰,模型匹配(MMC)控制器能在一定范围内予以消除,使系统具有很好的鲁棒跟随性及鲁棒稳定性。
表2 下位控制器性能验证实验条件表
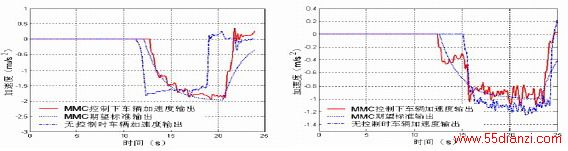
a)实验1 结果对比图 b)实验2 结果对比图
图10 下位控制器控制效果对比图
2.3 车辆控制执行技术
汽车主动避撞系统所用执行器有两个:节气门伺服执行器和制动作动器。对于节气门伺服执行器,采用脉宽调制(PWM)控制的直流电机来实现。对于制动作动器由于制动系统的好坏直接关系到驾驶员的生命安全,所以要求自动制动系统响应要快,可靠性要高;由于目前汽车内可用空间较好,所以要求自动制动系统体积尽量小;为能够直接、迅速、广泛地在国内轿车上得到应用,要求自动制动系统对原车的改动要尽量小。在汽车行驶过程中,仍然以人为主,只当汽车间距小于安全距离而人又没有采取措施时自动制动系统才会起作用。在自动制动作用过程中,只要人一踩制动或加速踏板,则控制权便交给驾驶员,自动制动系统不起作用。所以在自动制动系统和原制动系统之间应当有电控切换装置。本研究设计的自动制动系统采用液压系统,原理图如图11 所示。本系统输出压力的控制采用高速开关阀结合脉宽调制(PWM)
控制来实现。
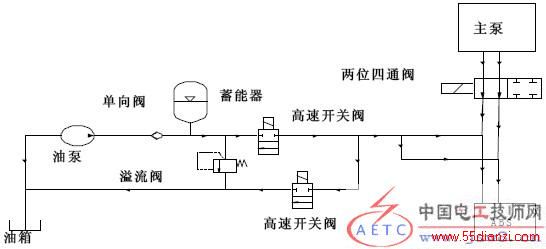
图11 液压自动制动系统原理图
3 结束语使汽车具有主动安全性,集信息感知、动态辨识、控制等技术与方法于一体是ITS 的主要研究内容之一。世界各大汽车公司,都在开展这方面的研发,目前日本、欧美汽车企业在汽车主动避撞技术方面已取得实用化成果。这些技术虽然其理论研究成果可以借鉴,但涉及具体技术属于公司保密范围,国内企业难以得到具体技术资料,且中国的道路及驾驶习惯与国外不同,不能直接引进使用国外技术。本研究在车辆运动中对周围障碍物的感知技术和方法、车辆行驶危险或安全状态的动态辨识方法、汽车主动避撞控制及执行技术等关键技术问题的研究方面取得了一定的突破和创新,为解决智能交通系统研究开发过程中的汽车行驶安全问题,提供了理论及技术支撑。
上一页 [1] [2]
本文关键字:汽车 智能 电工文摘,电工技术 - 电工文摘






