5 结论
目前投入使用的排爆机器人在实际排爆过程中都需要对机械手的各关节实施手动控制,以完成目标定位,进而抓取目标的功能。这种操作方式一方面对操作员的要求非常搞,另一方面也很难达到较高的定位精度。基于双目立体视觉技术来实现机械手的自动定位控制,则可以克服传统的手动操作方式的缺点,提高排爆机器人的性能与易操作性。
本文作者创新点:
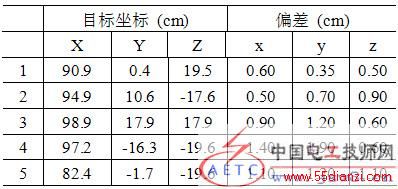
通过双目立体视觉技术来实现机械手的自动定位控制,即利用两摄像头拍摄的目标物的二维图像坐标,计算出目标物的三维坐标,然后根据根据此三维坐标对机械手的个关节实施控制,达到自动定位的目的。该方式提高了排爆机器人的易操作性和精确程度,提高了排爆机器人的性能,有望在实战中获得应用。
参考文献:
[1] 许永锡,等. 基于MatlabRTW的排爆机器人控制系统. 微计算机信息,2006,2-2:218-220.
[2] 刘水,赵群飞等. 基于PLC的防暴机器人控制系统设计. 计算机工程于应用 2002,31(1),22-24
[3] 刘艳玉,李德良,张飞龙,王长龙. ADS7852在双目测距中的应用. 微计算机信息,2006,4-2: 200-202
[4] 陈锡爱,黄孝明,徐方. 基于眼固定安装方式的机器人定位系统. 微计算机信息 2006,3-2: 182-184
[5] 刘江华, 陈佳品, 程君实. 双目视觉平台的研究[J]. 机器人技术与应用 , 2002,(01)
本文关键字:机械手 电工文摘,电工技术 - 电工文摘






