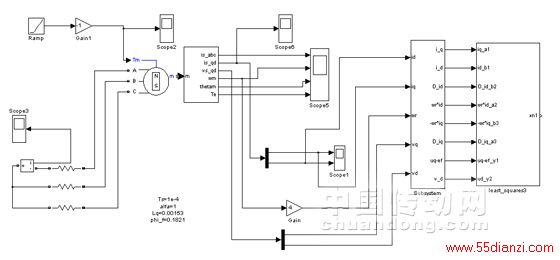
图1 基于最小二乘法参数辨识的系统原理框图
系统采用控制方案:根据模块化建模的思想,将控制系统分割为各个功能独立的子模块,其中主要包括:永磁同步电机本体模块、电机运行状态测量模块和最小二乘法参数辨识模块。
通过这些功能模块的有机整合,就可在Matlab/Simulink中搭建出永磁同步电机参数辨识系统的仿真模型,并实现电机参数辨识算法。
其中,最小二乘法参数辨识模块由于需要大量的矩阵运算,采用了M语言进行编写后作为一个模块嵌入Simulink环境中,充分利用Simulink提供模块化环境和M语言的灵活性,做到两者有效结合。
3 仿真结果
针对上述建立的仿真模型进行了永磁同步电机系统的仿真测试。永磁同步电机参数见表1:
表1 仿真参数
仿真的过程中,在永磁同步电机的转子轴上加-30Nm/s递增的转矩,使永磁同步运行在发电模式的同时,电机处于不停地加速状态,这样做的目的是使得电机的状态方程满足式(7)。仿真的最大步长为 ,采用M语言编写的参数辨识模块于0.53s启动,每隔0.01s进行一次参数辨识。从而每隔0.01s利用新辨识出的电机参数在之前辨识出的电机参数的基础上进行更新,以获得准确的实时电机参数。
图2是在电机待辨识参数初始值都为0的情况下,对永磁同步电机控制过程中参数辨识的仿真结果:虚线分别表示电机的实际参数值,实线表示参数辨识的结果。从图2的a、b和c图都可以看出从0.53s算法开始运行,永磁电机的d轴和q轴电感包括定子电阻从初始值0开始单调地向电机相应的实际参数进行收敛,并无限地逼近相应电机参数的实际值。
仿真结果表明基于最小二乘法的参数辨识算法能够在线实时准确辨识出电机参数,具有较好的收敛性和辨识精度。
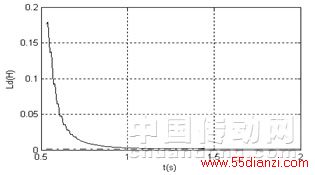
(a)d轴电感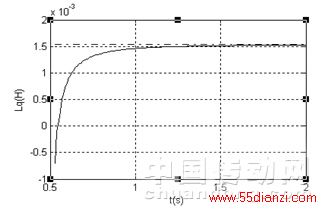
(b)q轴电感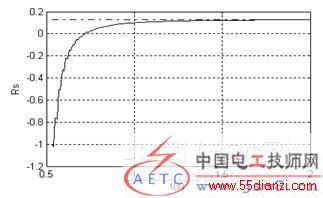
(c) 定子电阻
图2 电机参数辨识结果
4 结 论
为了提高对永磁同步电机的控制性能,本文在永磁同步电机的转子同步旋转坐标系下,采用最小二乘法对电机参数进行辨识,在Matlab/Simulink中搭建出永磁同步电机参数辨识系统的仿真模型。仿真结果表明基于最小二乘法的参数辨识算法能够在线实时准确辨识出电机参数,具有较好的收敛性和辨识精度。






